풀스택 웹🌐 개발자 지망생 🧑🏽💻
➕ 인공지능 관심 🤖
Categories
-
┣
▶ COMPUTER_SCIENCE
📂: 7 -
┣
▶ WEB
📂: 3 -
┣
▶ ETC
📂: 3-
┃
┣
ETCS
📄: 10 -
┃
┣
SUBBRAIN 개발기
📄: 5 -
┃
┗
YOS 개발기
📄: 1
-
┃
┣
-
┗
▶ AI
📂: 9-
┣
AITOOLS
📄: 3 -
┣
CV
📄: 2 -
┣
DEEP_LEARNING
📄: 1 -
┣
DATA_VIS
📄: 2 -
┣
GRAPH
📄: 1 -
┣
LIGHTWEIGHT
📄: 1 -
┣
MATH
📄: 1 -
┣
NLP
📄: 3 -
┗
STRUCTURED_DATA
📄: 2
-
┣
딥러닝 기본
- Historical Review
- 뉴럴 네트워크(Neural Networks) - MLP
- Convolutional Neural Networks
- Modern CNN
- Computer Vision Applications
- Sequential Models - RNN
- Transformer 모델
- Generative Models(생성 모델)
딥러닝 기본(Deep learning Basic)
본 자료는 Naver BoostAI camp의 강의를 정리한 내용입니다
Historical Review
소개
- 구현(코딩) 실력, 수학 스킬, 최신 논문 기술 등의 능력이 중요하다.
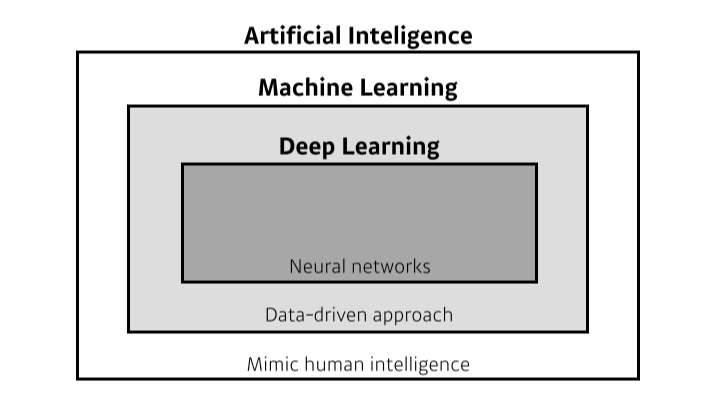
[img 0. 인공지능의 대분류]
- 인공지능 : 인간의 지능을 흉내
- 머신러닝 : 데이터를 통해 인공지능을 학습
-
딥 러닝 : 심층 신경망을 활용한 모델 이용하는 머신러닝, network를 깊게 쌓음
- 딥러닝에 필요한 4가지 요소
- 모델이 학습할 데이터 : 풀고자할 문제에 따라 필요한 데이터가 다르다.
- Detection, Classification, Visual QnA 등
- 데이터로 학습, 판단할 모델 : 데이터를 필요한 데이터로 바꿔주는 것
- AlexNet, GoogLeNet, GAN 등
- 모델 학습 방법인 loss 함수 : 모델을 학습하는 방법
- 단순히 줄이는 것이 아니라 학습하지않은 데이터등에도 동작해야함.
- MSE, CE, MLE 등
- loss 함수를 최소화할 알고리즘 : loss 를 어떻게 줄일 것인가?
- SGD, Adagrad 등이 있음
- 추가로 Ensemble, MixUp, Dropout 등 테크닉이 있음
- 모델이 학습할 데이터 : 풀고자할 문제에 따라 필요한 데이터가 다르다.
딥러닝의 역사
Denny Britz의 Deep Learning’s Most Importat Ideas - A Bref Historical Review를 참조함
- 2012 - AlexNet: 최초로 인공지능 대회에서 1등을 한 DeepLearning 방법론. 시초
- 2013 - DQN : 강화학습에 쓰인 방법론, Q Learning 접목, Deepmind의 작품
- 2014 - Encoder/Decorder : 인공지능 번역에 쓰이는 방법론, 다른 언어의 연속으로 번역
- 2014 - Adam Optimizer : 효과 좋은 optimizer, 왠만하면 잘된다라는 뜻이라고 함.
- 2015 - Generative Adversarial Network(GAN) : 새로운 것을 생성하는 데 많이 사용하는 AI
- 2015 - Residual Networks(ResNet) : 너무 깊어진 Network layer의 성능 저하를 막아줌
- input을 추가로 넣어주는 것
- 2017 - Transformer : attention 구조를 이용한 google의 방법론
- 2018 - BERT(fine-tuned NLP models) : Transformer + bidirection 구조를 활용한 모델
- Bidirectional Encoder Representations from Transformers의 약자
- 2019 - Big Language Models(GPT-X) : OpenAI에서 만든 BERT의 Language 모델, 굉장히 많은 parameter로 이루어짐
- 2020 - Self-Supervised Learning: SimCLR( a simple framework for contrastive learning of visual representations)의 줄인말, 학습 데이터 외의 라벨을 모르는 데이터를 활용, 지도 학습 + 비지도 학습
- 시뮬레이터, 도메인 지식을 활용해 학습 데이터를 추가로 만드는 연구도 활발히 이뤄지는 중
뉴럴 네트워크(Neural Networks) - MLP
Neural Networks
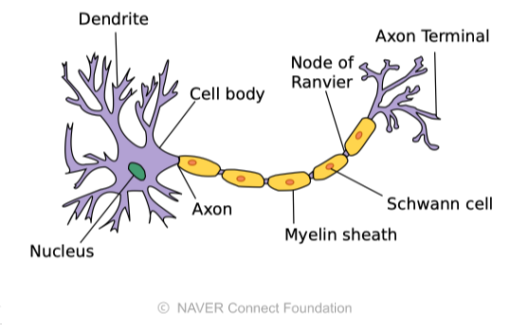
[img 1. 두뇌 속의 신경망]
동물의 생물학적 신경망에서 영감을 받은 컴퓨팅 시스템 - wikipedia
-
생물학적 구조만 비슷할 뿐, 실제 작동원리와는 관계없음.
-
행렬의 곱과 비선형 연산의 반복을 통하여 함수(논리)를 근사추정하는 것.
- neural networks are function approximators that stack affine transformations followed by nonlinear transformations.
Linear Neural Networks
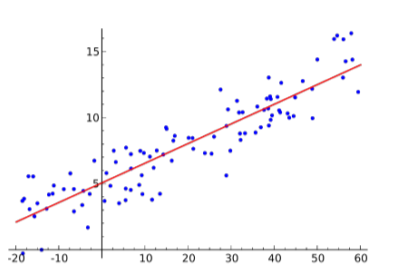
[img 2. 선형 모델 그래프]
- Data: $\mathcal{D} = {(x_i,y_i)}^N_{i=1}$ : input 값과 output 값이 각각 하나
-
Model: $\hat{y} = wx+b,\ \hat{y} : 모델의\ 예상치$ : 선형 그래프로 이루어짐
- Loss: $loss =\frac{1}{N}\sum^N_{i=1}(y_i-\hat{y_i})^2$ : 실제 값과 얼마나 다른가에 대한 척도, 보통 MSE loss 함수로 loss 측정
[math 2. backprogation을 이용한 w와 b의 편미분값 구하기]
\(w = w - \eta\frac{\partial loss}{\partial w},\ b = b-\eta \frac{\partial loss}{\partial b}\)
[math 2-1. loss 값을 줄이기 위한 새로운 w와 b 업데이트]
-
이러한 방식으로 최적값을 구하는 것을 gradient descent라고 한다.
-
matrix 연산을 통하여 여러 차원의 input과 output 또한 해결 가능
- matrix 연산은 두 벡터 공간 상의 변환을 의미함
Activation function and Multi-layer Perceptron
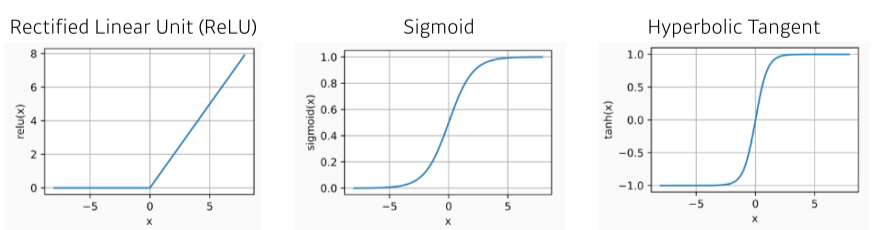
[math 3. Activation fucntion의 종류와 그래프 모양]
- 각 문제, 데이터마다 사용해야할 Activation function이 다르다.
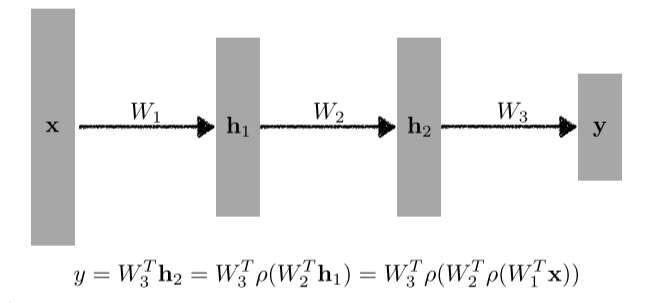
[img 3. Multi-Layer Perceptron]
-
이러한 여러 matrix 연산과 matrix 연산 사이의 activation function에 의해 nonlenar transform을 거쳐서 여러 층의 neural network가 된다.
-
각 문제마다 loss function을 다르게 하게 된다.
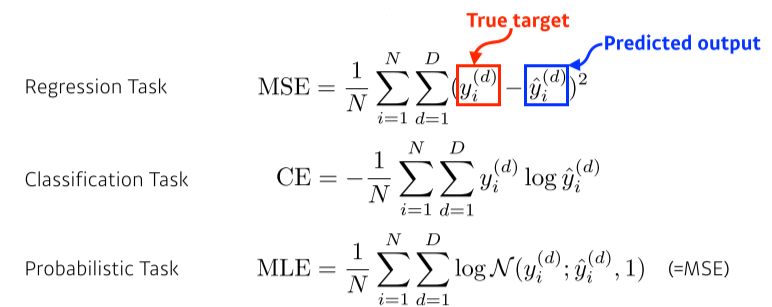
- Regression Task : 선형 문제 (집 크기 vs 집 가격) 같은 문제에서는 MSE 등을 사용
- Classification Task : 분류 문제(손글씨 숫자 구분) 같은 문제는 CE 등을 사용(가장 높은 확률의 class를 선택)
- Probabilistic Task : 확률 문제(나이 맞추기 ) 같은 문제에는 MLE를 사용.
[img 3. Multi-Layer Perceptron]
- 실습은 https://colab.research.google.com/drive/14lEFtnt3kEn-LiwTKTwpUB-3VQ0Xx84W#scrollTo=3AS5BdrMw1E9 또는 mlp.ipynb 파일 참조
Optimization
관련 실습 : https://colab.research.google.com/drive/1p4H1mZpa41n3C8fQCtknQ0NfJGtEUIl6#scrollTo=B-uu6x8DFwZ9 혹은 optm.ipynb 참조
용어의 정의
-
Gradient Descent(경사 하강): 반복 1차 미분을 통하여 loss의 국소 최소점을 찾는 알고리즘
-
First-order iterative optimization algorithm for finding a local minimum of a differntiable function.
-
Generalization(일반화): training error와 test error의 차이가 적음을 의미.
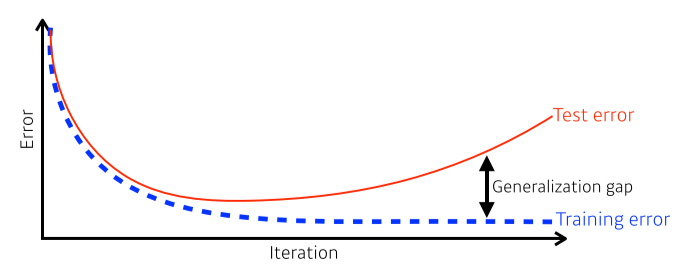
[img 4. generalization의 그래프]
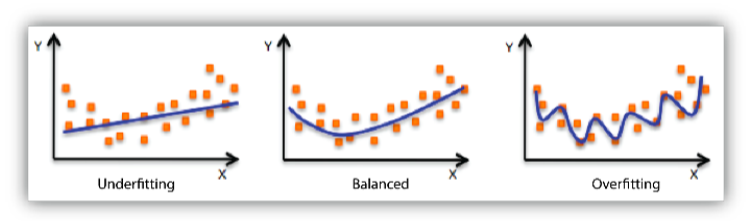
[img 4-1. fitting의 도식화]
- underfitting은 너무 training을 안해서 그래프가 적절하지 않음
- overfitting은 너무 training을 많이해서 유연성이 없고, 해당 데이터 이외의 데이터에 부적합
-
Cross-validation(교차 검증, 또는 k-fold validation)
- 데이터를 k개로 나눈 뒤 학습 데이터와 검증(validation) 데이터를 바꿔가며 hyper parametr를 정하는 모델 검증 기술
-
training, validation, test 데이터로 나누게 된다.
- parameter : 최적해에서 찾는 값(weight, bias 등)
- hyper-parameter: 내가 시작할 때 주는 값(loss function, learning rate 등)
-
Bias(편향) and Variance(분산도): 분산이 적은 것이 좋다.
- 우리가 줄이는 cost는 사실 여러 부분으로 나뉘며 무엇을 줄일 지 생각해봐야한다.
- noise가 많은 데이터면 bias와 variance를 둘다 줄이는 것이 힘드므로 골라야함
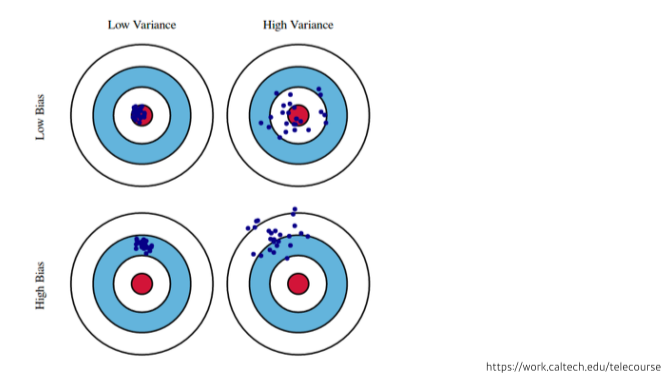
[img 4-2. bias, variance 그림]
\(Given\ \mathcal{D} = \{(x_i,t_i)\}^N_{i=1},\ where t = f(x)+ \epsilon\ and\ \epsilon \sim \mathcal{N}(0, \sigma^2)\\
\stackrel {\mathbb{E}\left[(t-\hat{f})^2\right]}{cost} = \mathbb{E}\left[(t-f +f-\hat{f})^2\right]=\dots=\stackrel {\mathbb{E}\left[(f-\mathbb{E}[\hat{f}]^2)^2\right]}{bias^2}+\stackrel {\mathbb{E}[(\mathbb{E}[\hat{f}]-\hat{f})^2]}{variance}+\stackrel {\mathbb{E}[\epsilon]}{noise}\)
[math 4. cost(loss)의 구성]
- bootstrapping : 학습 데이터를 일부만(예를 들어 80%만) 쓴 데이터를 각기 달리하여 여러개 만들어 랜덤 샘플링하여 학습시켜 보는것
- 학습결과가 일정하면 데이터가 일정한 것이고, 결과가 각양각색이면 편차가 큰 것이다.
- 이렇게 만든 여러 학습 데이터의 여러 모델의 평균이나 voting을 취하기도 함.(앙상블)
- bagging(Bootstrapping aggregating) vs boosting
- bagging : bootstraping으로 만들어진 여러개의 모델 (앙상블 기법)
- boosting : 전체 데이터로 학습 해본 뒤, 해당 모델로 결과를 측정해 잘 예측못하는 데이터만 모아서 가중치를 더 크게 준 뒤, (랜덤 뽑기에 더 많이 할당?) 새로운 모델로 만든 뒤 이전 모델과 합치는 형식으로 진행 (앙상블 기법의 한 종류)
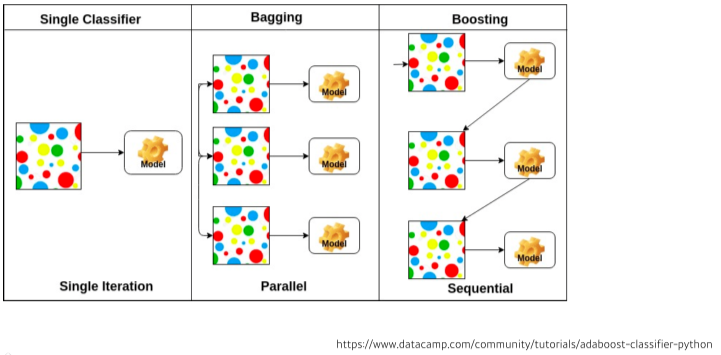
[img 4-3. bagging boosting 그림]
Practical Gradient Descent Methods
Gradient Descent Methods
- Stochastic gradient descent
- update with the gradient computed from a single sample
- 하나의 샘플마다 경사를 계산
- Mini-batch gradient descent
- update with the gradient computed from a subset of data
- batch 크기의 샘플마다 경사를 계산
- 가장 자주 사용함
- Batch gradient descent
- update with the gradient computed from the whole data
- 한번에 모든 샘플을 활용하여 경사를 계산
Batch-size Matters
- 일반적으로 batch size가 너무 작으면 너무 오래걸리고, 크면 계산량이 너무 많다.
- 연구 결과 batch-size가 작을 수록 유리하다는 것이 실험적으로 증명됨
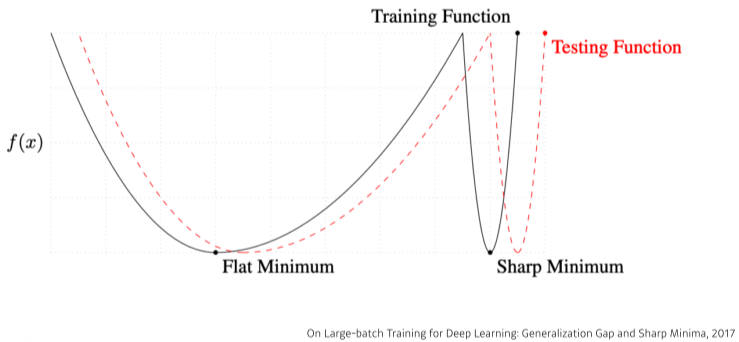
[img 5. batch size가 작을 수록 좋은 이유]
- batch size가 작으면 Flat Minimum, 크면 Sharp Minimum으로 도착하는 경향이 크다.
- Flat Minimum은 test data 에서도 generalization이 잘되있지만 sharp minimu에서는 실제 testing 데이터와 갭이 크다.
optimizer
- 특성을 확인하고 상황에 따라 골라서 사용해야함
Gradient Descent
$W_{t+1} \leftarrow W_t - \eta g_t,\ \eta:learning\ rate,\ g_t:Gradient$
[math 6. 경사하강법 ]
- 가장 기본적인 방법
- 적절한 learning rate를 잡는 것이 힘듦
Momentum
\[a_{t+1} \leftarrow \beta a_t + g_t\\ a_{t+1}:accumulation,\ \beta: momentum \\ W_{t+1} \leftarrow W_t - \eta a_{t+1}\\ \eta:learning\ rate\][math 6-1. 모멘텀 개념]
- 이전 gradient의 값이 영향을 조금 받은 gradient로 업데이트
- 기본버전보다 조금 낫다.
Nestrerov Accelerated Gradient
\[a_{t+1} \leftarrow \beta a_t + \nabla \mathcal{L}(W_t-\eta \beta a_t) \\ \nabla \mathcal{L}(W_t-\eta \beta a_t):Lookahead\ gradient,\ \beta: momentum \\ W_{t+1} \leftarrow W_t - \eta a_{t+1}\\ \eta:learning\ rate,\ g_t:Gradient\][math 6-2. NAG]
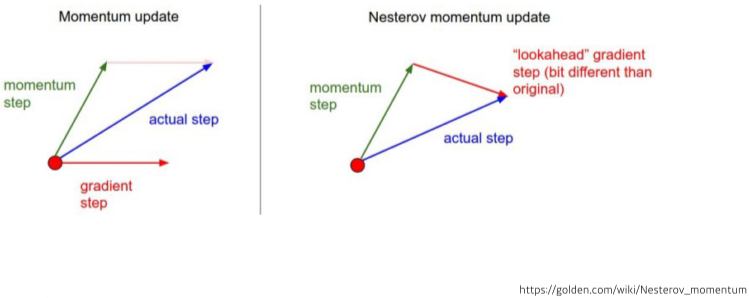
[img 6. NAG와 Momentum 차이점]
- momentum을 계량함
- 최소 지점에 도달하는 것이 증명됨
- 이전 gradient와 현재 그레디언트로 구하는 방법과 달리 이전 momentum gradient 벡터에서 현재 벡터로 이동한다는 다른점이 있음
Adagrad
\[W_{t+1} = W_t - \frac{\eta}{\sqrt {Gt+\epsilon}}g_t\\ G_t : Sum\ of\ gradient\ squares,\ \epsilon:for\ numerical\ stability\][math 6-3. Adagrad 개념]
- 파라미터의 변화량이 너무 적게 변하면 크게, 많이 변화해온 파라미터는 적게 learning rate를 잡아주어 조정해줌
- 뒤로 가면 갈수록 G~t~가 커져서 무한대로 가까이 변해 거의 learning rate가 0으로 수렴되는 단점
- $\epsilon$은 분모가 0이 되는 것을 막기 위해 주는 아주 작은 값.
Adadelta
\[G_t = \gamma G_{t-1} + (1-\gamma)g_t^2\\ W_{t+1} = W_t - \frac{\sqrt{H_{t-1}+\epsilon}}{\sqrt {G_t+\epsilon}}g_t\\ H_t=\gamma H_{t-1}+ (1-\gamma)(\Delta W_t)^2\\ G_t:EMA\ of\ gradient\ squares,\ H_t: EMA\ of\ difference\ squares\][math 6-4. Adadelta 개념]
- learning rate를 사용하지 않음.
- window size를 정하고 해당 size step 만큼만 learning rate에 영향을 주게하여 무한대로 수렴하는 것을 막음
- 예를 들어 윈도우 사이즈 10이번 11번 바뀌면 첫번째 파라미터 변화는 영향을 안주게 하고 11번째를 대신 추가.
- 최근 100개의 값들을 모두 저장하면 메모리가 터지므로, exponential을 이용해서 구함
RMSprop
\[G_t = \gamma G_{t-1} + (1-\gamma)g_t^2\\ W_{t+1} = W_t - \frac{\eta}{\sqrt {G_t+\epsilon}}g_t\\ G_t:EMA\ of\ gradient\ squares,\ \eta: stepsize\][math 6-5. RMSprop 개념]
- adadelta에 stepsize만 추가, 그냥 경험적, 실험적으로 깨달은 식
Adam
\[m_t = \beta_1 m_{t=1} + (1-\beta_1)g_t\\ v_t = \beta_2v_{t-1} - (1-\beta_2)g_t^2\\ W_{t+1} = W_t - \frac{\eta}{\sqrt {v_t+\epsilon}}\frac{\sqrt{1-\beta_2^t}}{1-\beta_1^t}m_t\\ M_t:Momentum,\ v_t: EMA\ of\ gradient\ squares,\ \eta: Step\ size\][math 6-6. Adam 개념]
- RMSdrop에 momenturm을 합친 개념
- 무난하고 좋은 성능을 보인다.
Regularization
- generalization을 위해 학습에 제한을 거는 방법
Early Stopping
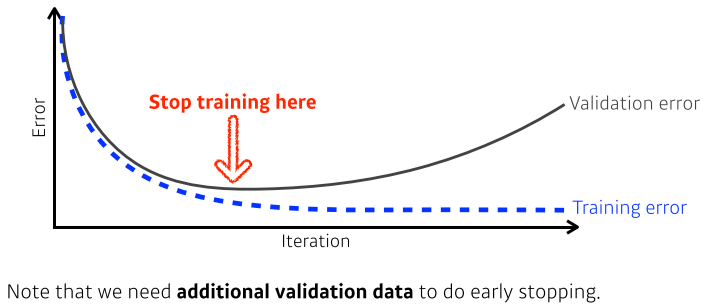
[img 7. early stopping]
- validation error와 training error를 비교하며 generalization gap이 가장 적을 때 stop하는 방법
Parameter Norm Penalty
\[total\ cost = loss(\mathcal{D;W}) + \frac \alpha 2 \left \| W \right \|^2_2\\ \frac \alpha 2 \left \| W \right \|^2_2:Parameter\ Norm\ Penalty\][math 7. parameter Norm Penalty에 의한 cost 계산]
- parameter들의 합이 너무 커지는 것을 방지
- 부드러운 parameter일 수록 generalization이 좋은 경향이 있음
Data Augmentation
- 데이터가 적을 때는 오히려 전통적인 머신러닝이 성능이 좋지만, 데이터가 크면 클수록 최신 딥러닝이 좋다.
- 문제는 데이터가 적으므로, 기존의 데이터를 여러가지 방법으로 바꾸어서 늘리는것
- 이미지 데이터로 예시를 들면, 흑백, 일부 가림, 이미지 방향 반전 등이 있다.
Noise Robustness
- data Augmentation과 비슷하지만, 데이터 뿐만 아니라 weights에도 노이즈를 주어서 성능 향상
Label Smoothing
- 데이터 2개를 뽑아서 섞어 decision boundary를 부드럽게 해줌
- mix-up 방법, cumMix 방법 등이 있음
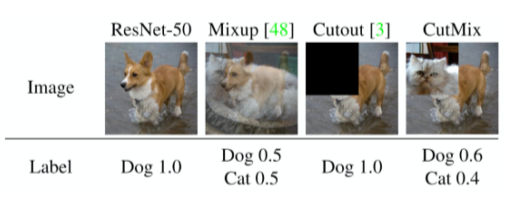
[img 7-1. Label Smoothing의 그림예시]
- 성능이 되게 좋다.
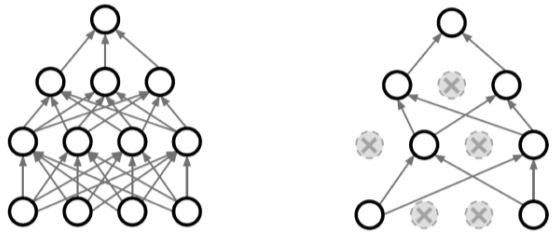
Dropout
[img 7-1. Label Smoothing의 그림예시]
- 랜덤하게 neuron을 버린다.
- 성능은 좋아지지만 수학적으로 증명이 되진 않음
Batch Normalization
\[\mu_B = \frac 1 m \sum_{i=1}^m x_i\\ \sigma^2_B = \frac 1 m \sum^m_{i=1}(x_i-\mu_B)^2\\ \hat{x}_i =\frac {x_i - \mu_B}{\sqrt{\sigma^2_B+\epsilon}}\][math 7-1. Batch Normalization 계산]
- 논란이 크지만 성능이 좋아짐.
- layer들의 parameter들의 값을 평균과 분산을 이용하여 같은 값으로 바꿈.
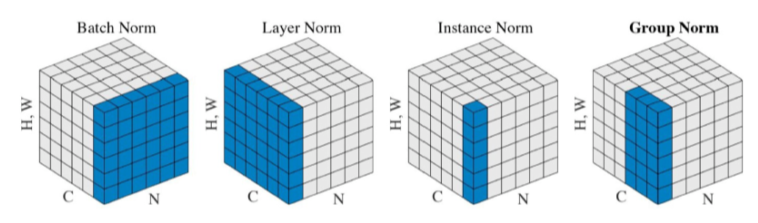
[img 7-2. 다른 normalization의 종류]
Convolutional Neural Networks
Convolution 연산
- 2개의 함수가 있을때 2개의 함수를 섞는 operator
- 연속 공간, 이상 공간에 따라 수식 다름
- I는 전체 공간, K는 필터
\(\cdot Coninuous\ convolution:\ (f*g)(t) = \int f(\tau)g(t-\tau)d\tau=\int f(t-\tau)g(t)d\tau\\
\cdot Discrete\ convolution:\ (f*g)(t) = \sum^\infty_{i=-\infty} f(i)g(t-i)=\sum^\infty_{i=-\infty} f(t-i)g(i)\\
\cdot 2D\ image\ convolution:\ (I*K)(i,j) = \sum_m\sum_n I(m,n)K(i-m,j-n)=\sum_m\sum_n I(i-m,i-n)K(m,n)\\\)
[math 8. Convolution operator]
- 2차원 콘볼루션 연산의 예시.
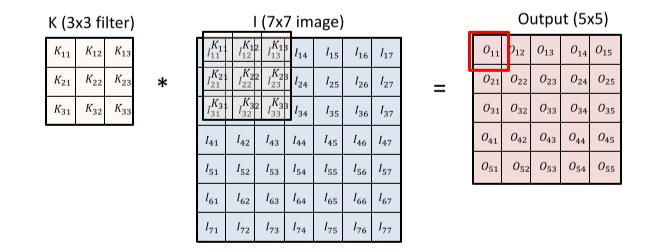
[img 8. 2D image Convolution 그림]
\(O_{11}=I_{11}K_{11}+I_{12}K_{12}+I_{13}K_{13}+I_{21}K_{21}+I_{22}K_{22}+I_{23}K_{23}+I_{31}K_{31}+I_{32}K_{32}+I_{33}K_{33}+bias\\
O_{12}=I_{12}K_{11}+I_{13}K_{12}+I_{14}K_{13}+I_{22}K_{21}+I_{23}K_{22}+I_{24}K_{23}+I_{32}K_{31}+I_{33}K_{32}+I_{34}K_{33}+bias\\
O_{13}=I_{13}K_{11}+I_{14}K_{12}+I_{15}K_{13}+I_{23}K_{21}+I_{24}K_{22}+I_{25}K_{23}+I_{33}K_{31}+I_{34}K_{32}+I_{35}K_{33}+bias\\
O_{14}=I_{14}K_{11}+I_{15}K_{12}+I_{16}K_{13}+I_{24}K_{21}+I_{25}K_{22}+I_{26}K_{23}+I_{34}K_{31}+I_{35}K_{32}+I_{36}K_{33}+bias\)
[math 8-1. 2D image Convolution operation]
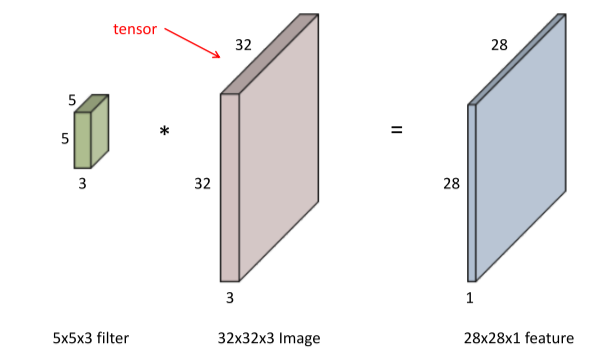
[img 8-2. 2D image Convolution filter operation]
- 2차원 이미지의 경우 tensor로 표현되며, 보통 rgb로 계산 시 뒤의 X3(R,G,B)은 생략이 된다.
- 즉 5X5 convolution 연산은 기본적으로 5x5x3에서 x3이 생략된 것이다.
- 계산 결과는 x1이 된다.
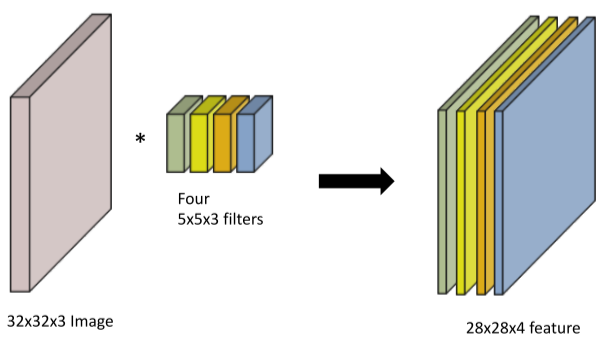
[img 8-3. 2D image Convolution featuremap]
- feature map을 연산할 때 여러 층의 feature가 나오는 방법은 여러겹의 필터를 곱하여 만드는 것이다.
maxpool2d층 원리
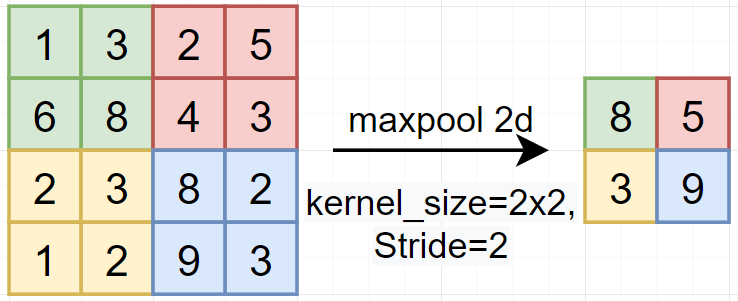
[img. Maxpool 2d층 예시]
- 각 구역을 kenelsize와 stride 만큼 나누어 가장 큰값을 취함
- Max값을 취하는 Maxpool이외에도 평균값을 취하는 averagepool등도 있다.
- featureamp의 크기가 줄어들어 성능을 줄이고 특징을 두드러지게 할 수 있다.
- 다만, 공간 정보(위치, 방향, 비율)등이 모호해 지기도 한다.
CNN 구조와 용어
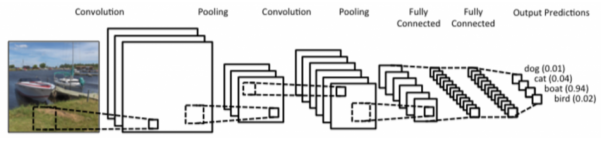
[img 8-4. CNN 구조]
- Convolution과 pooling layer는 feature extraction을 하는 역할
- Fully connected Layer는 decision making(ex) classification)을 위한 층
- 고전적인 CNN와 달리 최근에는 파라미터 수를 줄이기 + generalization 성능 향상을 위해 FCL을 줄이는 추세
- Stride
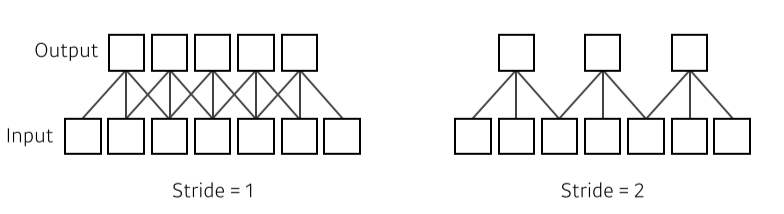
[img. Stride 1과 2의 차이 그림]
- pixel을 뛰어넘는 수, filter의 밀도,
- filter가 stride 수 만큼 pixel을 넘어가며 생성한다.
- 2차원의 경우 x,y 2개로 설정 가능
- Padding
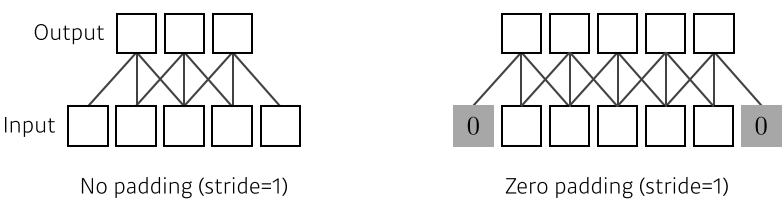
[img. padding의 유무 차이 그림]
- Stride 등으로 인해 외부로 나가는 픽셀을 padding으로 추가함
- zero padding은 0을 넣는다는 의미, 이로써 input과 output의 space dimension이 같아짐
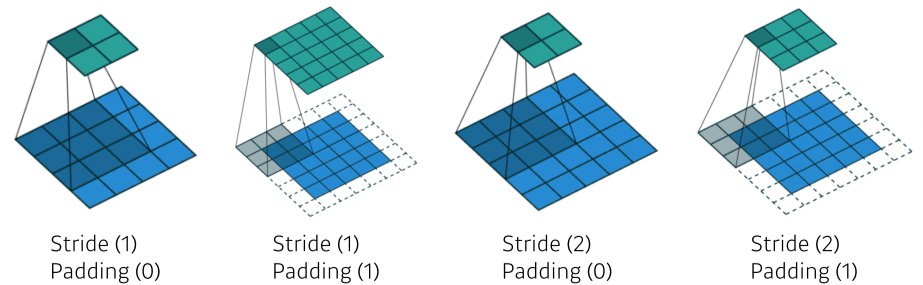
[img. stride, padding의 예시]
Convolution Arithmetic
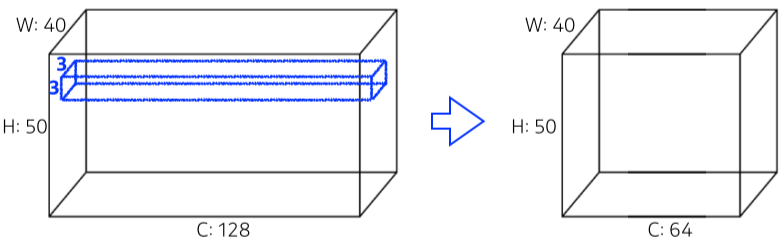
[img. $3 \times 3$ kernel, Padding 1, Stride 1 의 연산 parameter 계산 예시]
- parameter의 수는 가중치의 수
-
convolution layer의 학습 파라미터 수는 (필터 폭 X 필터 높이 X 입력 채널 수 X 출력 채널 수)로 계산
-
위 예시는 $3 \times 3 \times 128 \times 64 = 73,728 $ 개의 학습 파라미터 수
- Max pooling layer는 parameter output이 없다.
- 메모리 성능 제한 때문에 2개로 나누어 trainig 하는 layer?
- 그러므로 나뉜 수만큼 곱해주면 된다.
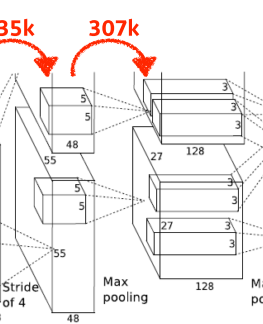
[img. convolution 연산 추가 예시]
- $5 \times 5 \times 48 \times 128*2 \approx 307k$
- 굳이 정확히 숫자를 세는 것이 아니라 대략적인 양(마치 알고리즘의 big O 표기처럼) 성능을 측정할 수 있어야 한다.
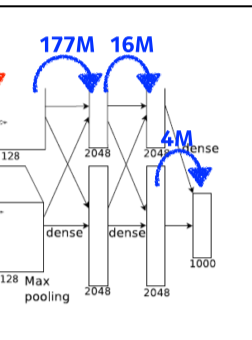
[img. dense layer (fully connected layer) 연산 예시]
-
input의 neuron과 output의 neuron의 수를 곱한 만큼이다.
-
$13 * 13 * 128 * 2 \times 2048 *2 \approx 177M$
- $2048 * 2 \times 2048 *2 \approx 16M$
- $2048*2 \times 1000 \approx 4M$
- Convolution operator는 같은 kernel을 연산에 쓰면서 parameter가 공유되므로 비교적 적다.
- 1000배 이상의 parameter가 fully connected layer에 쓰이므로 이 부분을 줄이는 추세이다.
1x1 convolution를 활용한 최적화
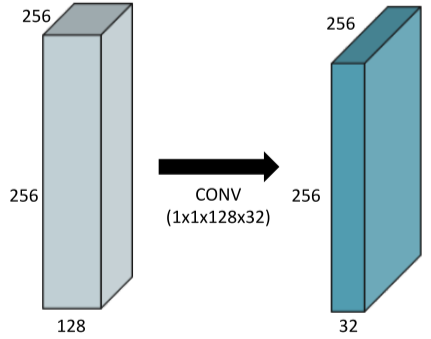
[img. 1x1 convolution 적용에 의한 차원(filter)의 감소 효과]
- 1x1 convolution layer 연산을 통하여 차원(filter)를 감소시켜 parameter 수를 줄이며, 층 수는 늘릴 수 있다.
- bottleneck 구조의 원리
Modern CNN
- ~2018년 까지의 CNN 기술
- ImageNet Large-Scale Visual Recognition Challenge 위주
- Classification, Detection, Localization, Segmentation 등의 부문이 있음
- 딥러닝의 최근 Error rate는 3.5% 이하로 인간의 5.1% 보다 에러가 적다.
- AlexNet
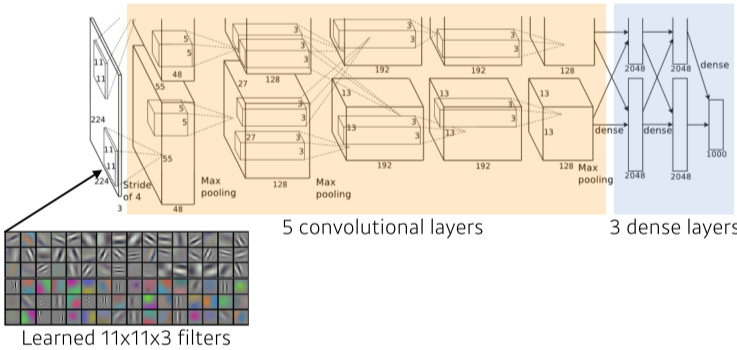
[img. AlexNet 구조]
-
컴퓨터 성능의 한계를 극복하기 위해 네트워크를 2개의 길로 나눈 8단의 layer.
- 11x11x3 filter 사용
- fitler의 크기가 클수록 convolution 연산 시, 고려되는 input의 크기(receptive field)가 커짐
- receptive field : feature map 추출시 고려 가능한 입력의 spacial dimension.
- 단, parameter의 수가 커짐
- ReLU 활성 함수 사용.
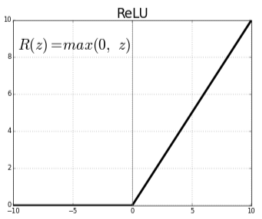
- [img. Relu 함수, 0 이하는 0으로 바꾼다.]
- 선형 모델의 장점, 학습이 용이, generalization 효과가 좋고, Vanishing gradient problem 극복
- 2개 GPU 사용, Data augmentation, Dropout 활용
- 그 외에도 Local Response normalization, Overlapping pooling 활용
- VGGNet
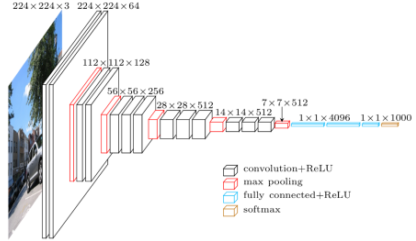
[img.VGGNet 구조]
-
3x3 convolution filter를 활용하여 파라미터 수 줄임
-
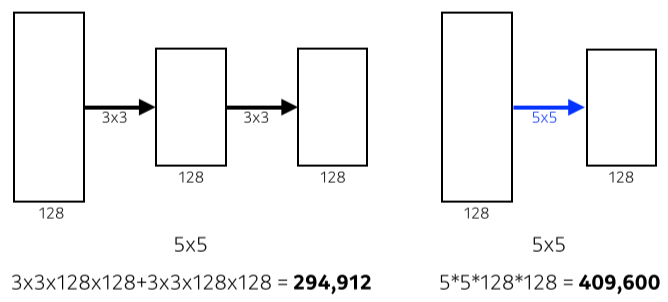
[img. 3x3 filter 두번 사용 vs 5x5 filter 한번 사용 파라미터 수 비교]
- 필터를 통해 보는 input field의 크기는 같으나 2번 걸침으로 써 파라미터의 수는 줄일 수 있다.
- 이 방법을 통해 보통 최대 7x7 필터를 넘지 않는다.
-
Dropout과 1x1 convolution을 dense layer에 활용
-
16층 버전(VGG16), 19층 버전(VGG19)이 있음
- GoogleNet
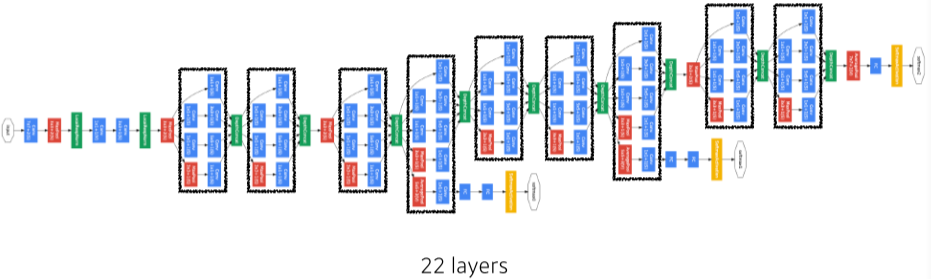
[img. googlenet 구조]
-
NIN 구조(Network in Network) : 네트워크 내부에 모듈 형식의 작은 네트워크들의 반복이 존재
-
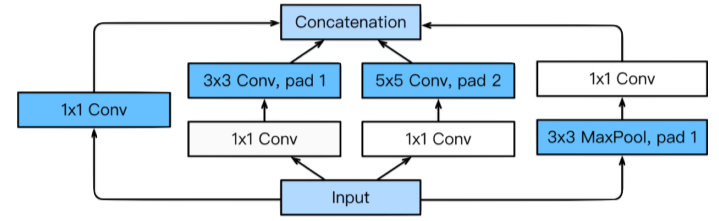
Inception blocks: 여러개로 퍼졌다고 다시 합쳐지는 블록
[img. inception 모듈]
-
여러 개의 responsed를 추출 가능
-
1x1 Conv layer에 의해 파라미터의 수 감소.
-
채널 방향의 차원을 줄이는 효과가 있음
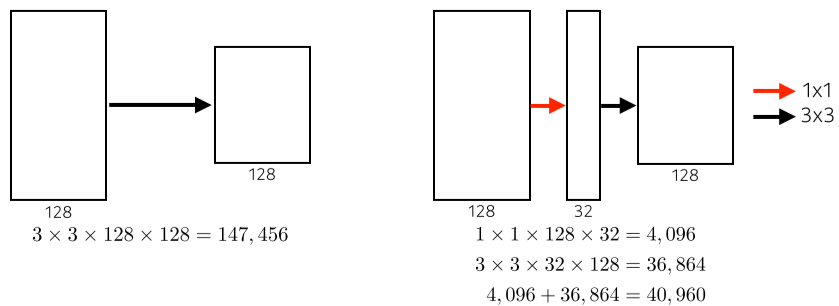
[img. 1x1 convolution의 채널 감소 효과에 의한 파라미터 수 감소]
-
VGGNet, AlexNet에 비해 layer는 깊지만 파라미터 수는 오히려 적음
- ResNet
-
깊은 층을 가진 DNN의 training error와 test error의 갭을 줄이고 학습을 용이하게 함.
-
이를 통해 깊은 층의 DNN을 활용할 수 있게 해줌.
-
parameter 수는 줄고, 성능을 늘어나기 시작함
-
Residual connection (or Identity map)
-
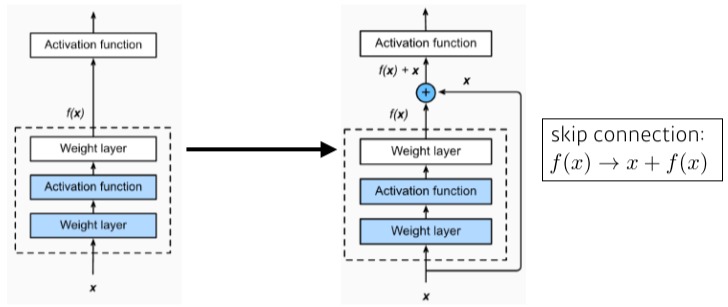
[img. identity map(residual map) 비교]
-
출력 값을 일부 layer 너머의 출력에 더해 줌(skip connection)
- 위 처럼 더해주는 simp shortcut 방식과 1x1 conv layer를 거쳐서 더해주는 Projected shortcut 방식(차원을 맞춰줘야 더 해지므로)이 있다.
-
일반적으로 convolution layer 다음에 batch Norm, activation 함수 순으로 배치되며, Residual 합산은 batch Norm 뒤에, activation 앞에서 이루어진다.
- 논란이 있으며, 순서가 바뀌어야 성능이 좋아질 때도 잇다.
-
-
Bottleneck architecture
- 1x1 conv layer을 통해 input channel을 줄여서 parameter 수를 줄이고, 다시 채널을 늘려서 값을 더할 수 있게 함.
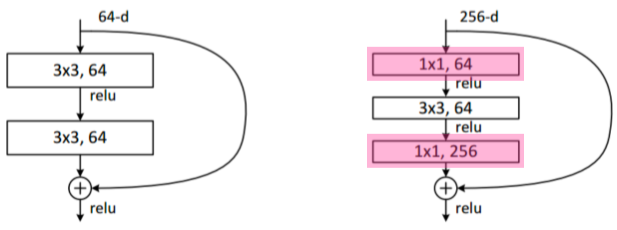
[img. bottleneck architecture 그림]
- DenseNet
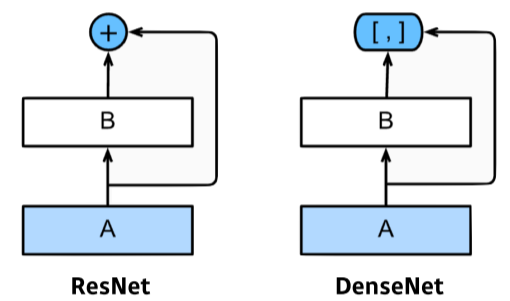
[img. Resnet과 DenseNet 차이]
- Resnet과 달리 결과값을 더하는 것이 아닌 concatenation 하는 방식
- 채널이 점점 기하 급수적으로 커지므로, 중간에 한번씩 채널을 줄여줌
- Dense Block : layer결과를 concatenate하여 채널을 늘림
- Transition Block : batchnorm과 1x1 conv, 2x2 avgPooling을 통하여 채널 수 줄임
- 위 두 block의 반복
- 간단하고 성능이 좋다.
Computer Vision Applications
Semantic Segmentation
- 이미지 내부의 일부(픽셀)를 물체로써 식별하는 문제
- 자율 주행에서 사람, 인도, 자동차 등을 식별하는 등에 사용
Fully Convolutional Network(FCN)
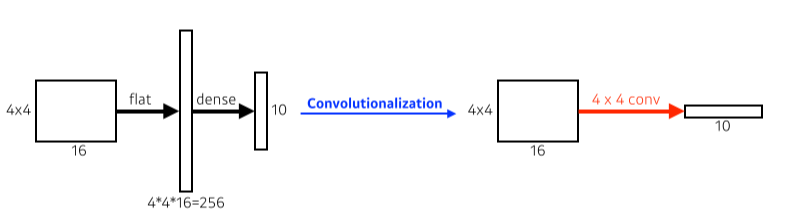
[img. 기존의 CNN vs Fully Convolutional Network]
-
dense layer을 거치지 않고, convolution layer로 바꾸어 결과의 크기를 10이 아닌 차원의 수를 10으로 만드는 것을 convolutionalization이라고 한다.
-
양쪽 다 parameter 수는 똑같이 4x4x16x10 = 2560으로 같다.
-
하지만 이를 통하여 원본보다 size가 줄어든 heat map을 구할 수 있다.
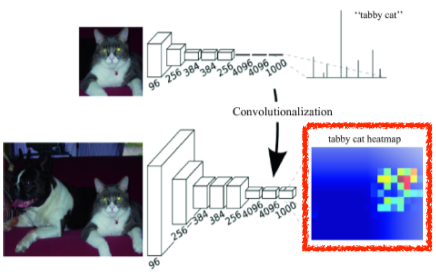
[img. convolutionalize 를 통한 heat map 생성, 고양이의 추정위치 확인이 가능해짐. ]
Deconvolution(conv transpose)
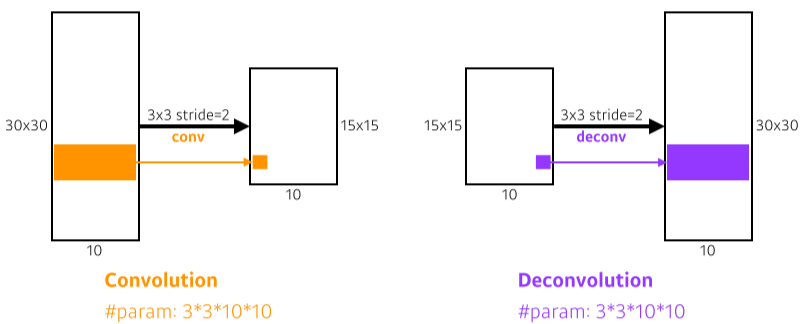
[img. Deconvolution 개념]
- 위의 줄어든 size를 원래대로 돌리기 위해 Deconvolution을 진행할 수 있다.
- 원래 픽셀을 그대로 돌려주진 않으나 원본 크기로 돌아가게 된다.
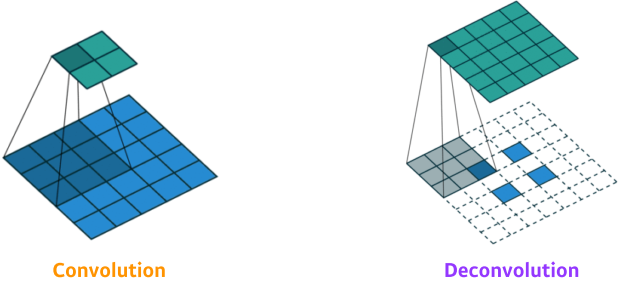
[img. Deconvolution의 도식화]
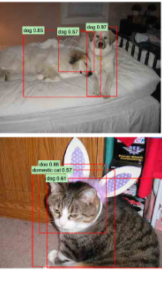
Detection
- 이미지 내 물체의 바운딩 박스를 찾는 문제
R-CNN
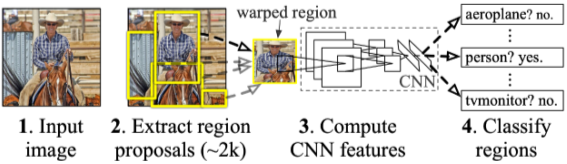
[img. R-CNN의 절차와 예시]
- 이미지에서 Selective search를 통해 물체로 추정되는 부분의 bounding box를 bounding box regression을 통하여 전부 뽑는다.
- 해당 bounding box를 같은 크기로 바꾼 뒤, CNN(여기서는 AlexNet)을 통하여 feature를 뽑는다.
- features를 SVM(support vector machine)을 통하여 classification한다.
- 1번의 물체를 추정되는 부분의 bounding box를 전부 뽑는 부분이 엄청나게 느리다.
SPPNet
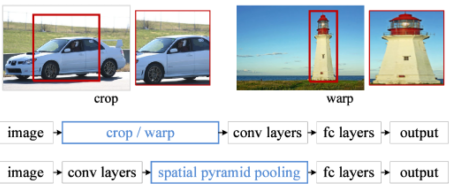
[img. SPPNet의 구조]
- CNN을 한번만 돌린 뒤, 해당 바운딩 박스 하나에서 feature를 뽑고 나서 그것을 spatial pyramid pooling을 통하여 classification함.
Fast R-CNN
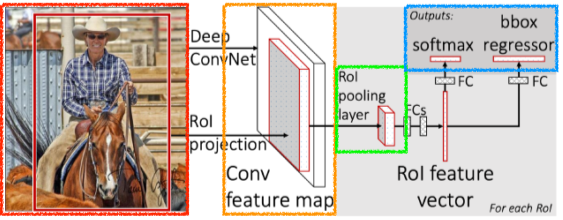
[img. fasc R-CNN]
- SPPNet과 비슷하다.
- 인풋 이미지의 바운딩 박스를 여러개 뽑는다.
- CNN feature map을 만든다.
- ROI(region of interest) pooling을 통하여 feature map을 뽑고, classification과 bounding-box regressor를 뽑는다.
Faster R-CNN
-
Fast R-CNN + Region Proposal Network
-
Region Proposal Network(RPN)
-
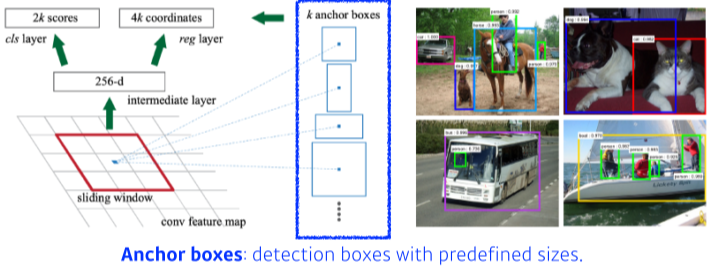
[img. RPN 예시]
- 바운딩 박스를 찾는 알고리즘 또한 교육함, classification은 하지 않음.
- Anchor Boxes: 미리 정의한 물체 크기로 이루어진 kernel
-
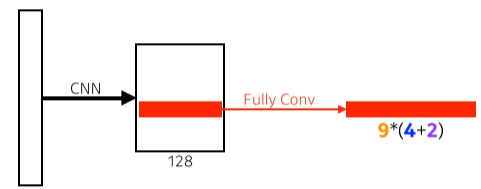
[img. RPN 차원]
- RPN의 Fully Conv에 의해 해당 공간이 원하는 물체를 가지고 있는지 판단
- 3개의 region 크기(128, 256,512)와 3개의 비율(1:1, 1:2, 2:1)을 가진 총 9개의 anchor boxes를 가짐
- 각 bouding box가 조정되어야할 크기 (width 크기, height 크기, x offset, y offest) 4개
- 해당 bounding box가 classification에 쓸모 있는가?(use it or not) 2개
- 총 9*(4+2) = 54개의 채널을 가진 Fully Conv를 가진다.
-
좀 더 좋은 성능의 detection 가능
YOLO(You only look once)
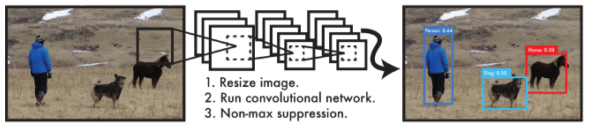
[img. yolo 예시]
-
v5 까지 나왔음, 아주 빠름, 리얼 타임을 유지할 수 있다.
-
추출한 bounding box들의 feature를 통해 각각 classification 하는 방식이 아니라, 한꺼번에 모든 bounding box를 classification 함
-
여러 bounding box를 동시에 한번만 하므로 YOLO라고 한다.
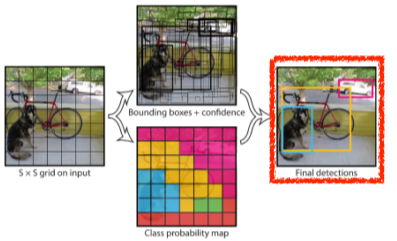
[img. YOLO 절차]
- 먼저 주어진 이미지를 SxS 그리드로 나눈다.
- 찾고 싶은 물체의 중앙점이 속해있는 그리드에서 bouding box와 classification을 진행한다.
- 무언가 물체의 중앙점을 갖는 여러개의 bounding box의 x,y 위치와 w,h 크기 그리고 쓸모 여부를 예측한다 ( 이 정보 5개를 B 라고 하자.).
- 위 2번과 동시에 각 그리드가 속한 물체의 classification(C개의 class가 있다고 가정하자)을 진행한다.
- 해당 정보를 취합한 뒤, SxSx(B*5+C) 사이즈를 가진 tensor가 된다.
- 먼저 주어진 이미지를 SxS 그리드로 나눈다.
-
v2의 경우 ROI 처럼 미리 정의된 크기의 bounding box를 이용하기도 하고, 다른 모델들 또한 yolo의 방법을 사용하는 등의 상호의 장점을 이용한 발전을 한다.
Sequential Models - RNN
Sequential Model
- sequential data란 순서 관계가 중요한 연속형 데이터로, 입력의 차원의 크기를 정확히 알 수 없다는 문제가 있다.(언제 부터 언제까지의 데이터를 사용해야하는가? 언제 데이터는 끝이 나는가?)
- 이러한 문제 때문에 CNN이나 Fully connected layer는 사용 못한다.
- Naive sequence Model
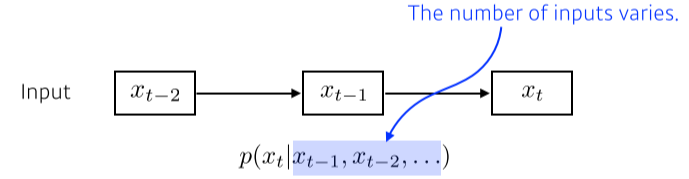
[img. Naive sequence Model]
- 과거의 정보들을 모두 고려하는 모델
- Autoregressive model(AR model)
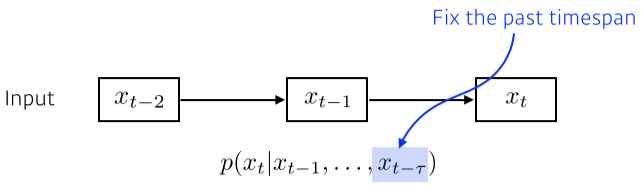
[img. Autoregressive model]
- fixed timespan $\tau$만큼 만을 고려하는 모델
- Markov model(first-order autoregressive model)
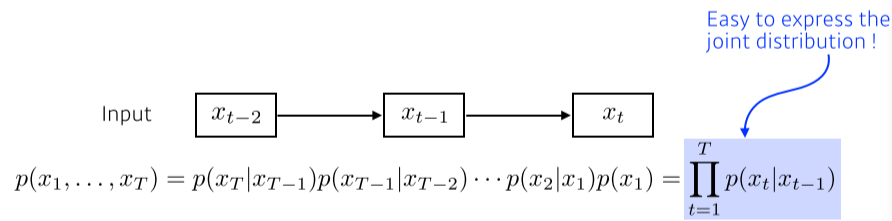
[img. Markov model]
- 바로 전 정보만을 이용하는 모델, joint distribution 표현이 쉬움
- Latent autoregressive model
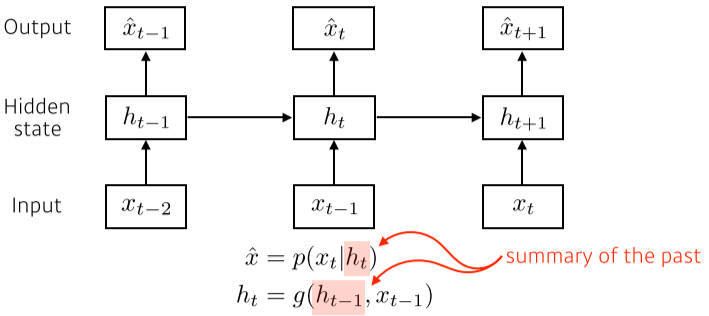
[img. Latent autoregressive model]
- 중간의 과거 정보들을 요약하는 Hidden state를 생성하여 해당 정보를 이용하는 모델
Recurrent Neural Network(RNN)
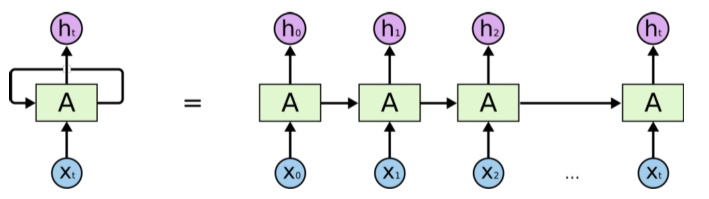
[img. RNN 그림]
- RNN은 AR model들을 구현한 신경망,
- Short-term dependecies : RNN의 단점, 과거 시점의 정보가 미래에 영향을 끼치기 힘듦, 이를 해결하기 위해 밑의 LSTM이 나타남.
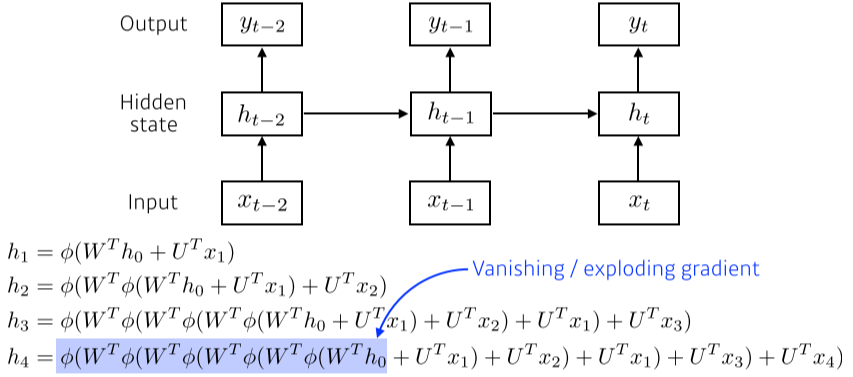
[img. RNN hidden state의 gradient 문제의 원인]
- 또한 Activation function의 종류에 따라 Vanishing/exploding gradient 문제가 생길 수 있다.
- RNN에서 ReLU를 잘 안쓰는 이유
Long Short Term Memory(LSTM)
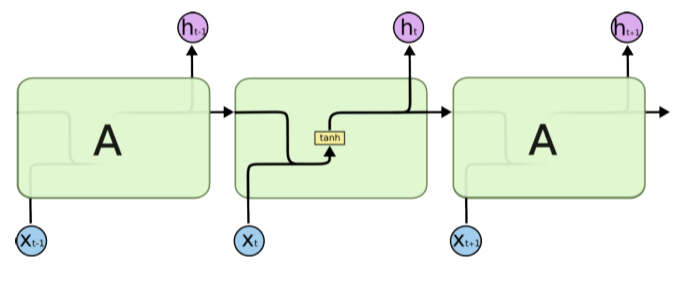
[img. Vanilla RNN Unit]
- tanh(hyperparabolic) 함수를 activation 함수로 활용하는 기본 유닛이다.
[img. LSTM Unit]
- Long Term dependency 문제를 해결하는데 좋은 LSTM 유닛
- 이전 LSTM Unit에서 이후 LSTM Unit으로 cell state와 hidden state 를 넘겨주게 된다.
- cell state는 hidden state와 달리 output으로 나오지 않으며, 일종의 이전 정보들을 summary를 해주는 정보, LSTM의 Core idea
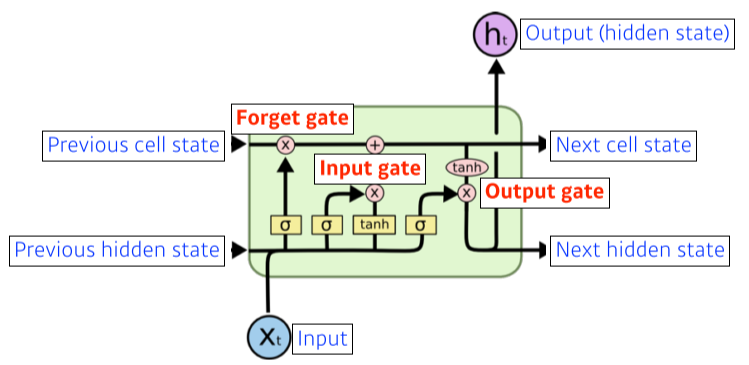
Gate
- LSTM을 이루는 3개의 게이트가 존재, LSTM의 데이터를 조작
- Forget Gate
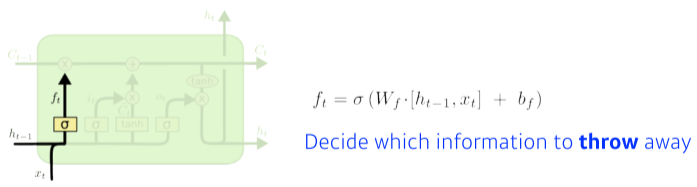
[img. Forget gate 구조]
- 어떤 정보를 잊어버릴지 결정.
- f~t~는 sigmoid를 사용하여 0 에서 1 사이 값으로 나오며, 이전 cell state 정보의 일부를 버리거나 살린다.
- Input Gate
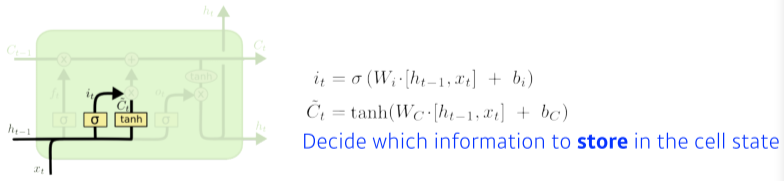
[img. Input Gate 구조]
- 어떤 정보를 cell state에 올릴지 결정
- i~t~는 이전 Hidden state와 X~t~를 통하여 어떤 정보를 올릴지 말지 결정한 결과인 i~t~를 만든다.
- 또 한 마찬가지로 이전 Hidden state와 X~t~를 통하여 올릴 정보인 $C_t^{\sim}$(C 틸다)를 만든다.
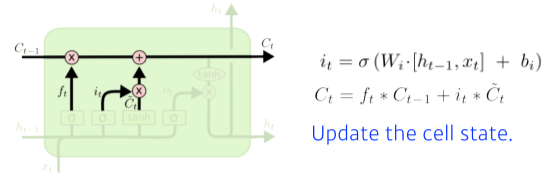
[img. 새로 통과시킬 Cell State 형성]
- $C_t^{\sim}$와 i~t~,f~t~ 를 이용해 업데이트할 Cell을 만들게 된다.
- Ouput Gate
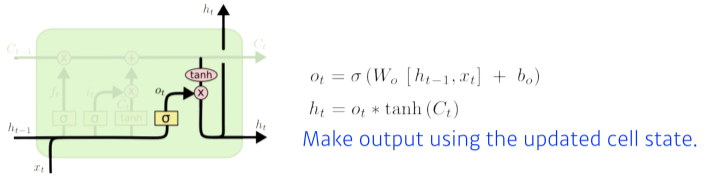
[img. Oupt Gate 구조]
- 위에서 만든 Update cell state와 input 을 이용해 output값을 만든다.
Gated Recurrent Unit(GRU)
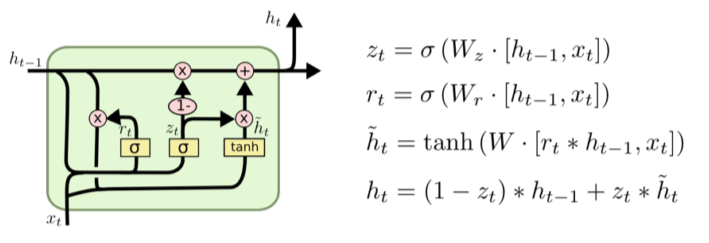
[img. GRU unit 구조]
- reset gate와 update gate만 존재하며 cell state가 존재 하지 않다.
- forget gate와 비슷한 reset gate와 비슷한 update gate가 존재한다.
- LSTM에 비해 구조가 단순하여 parameter 수가 적어 generalization performance가 좋으며, 성능이 좋은 편이다
- 하지만 최근에는 위 세가지 구조 전부를 transfromer 구조로 대체되는 추세이다.
Transformer 모델
-
Jay Alammar의 블로그에서 가져온 그림들임(http://jalammar.github.io/illustrated-transformer/)
-
불규칙적이고 예상하기 힘든 sequential 데이터의 문제점을 해결한 모델
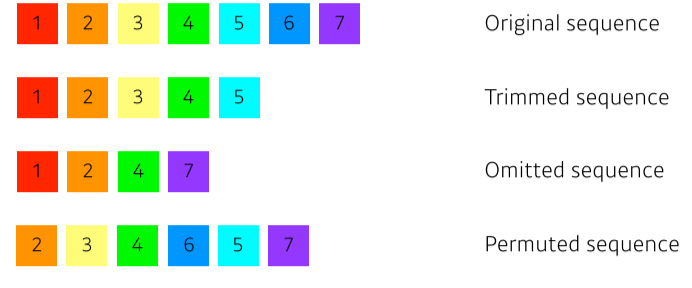
[img. sequential data의 대표 오류]
Transformer
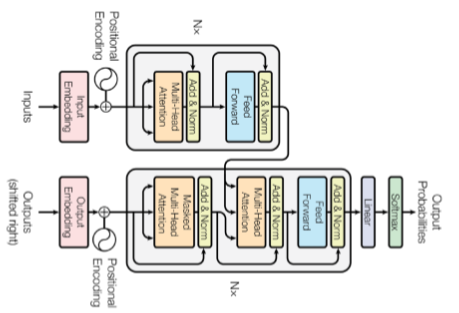
[img. Transformer 모델 예시]
-
재귀적 구조가 없는 대신, attention이란 구조를 활용한 sequence model
-
기계어 번역 문제를 해결하기 위해 시작했지만 여러 문제를 해결 할 수 있다.
-
Encoder와 Decoder 구조로 이루어져 잇다.
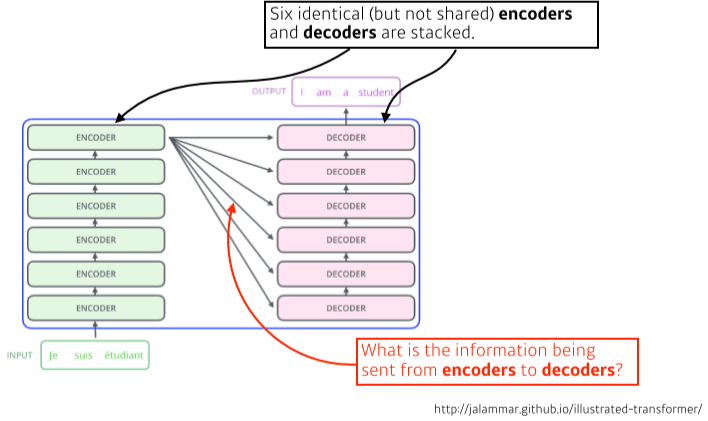
[img. NMT 문제에서 encoder, decoder 구조]
- 동일한 구조, 다른 파라미터를 받는 encoder, decoder가 쌓여있는 구조
- 하나의 모델에 입력과 출력 값이 각각 도메인, 입력의 숫자 등을 다르게 줄 수 있다.
- 즉 encoder-decoder 모델의 경우, encoder가 하나씩이 아닌 한번에 입력을 처리한다.
어떻게 encoder는 한번에 n개의 입력을 동시에 처리하는가?
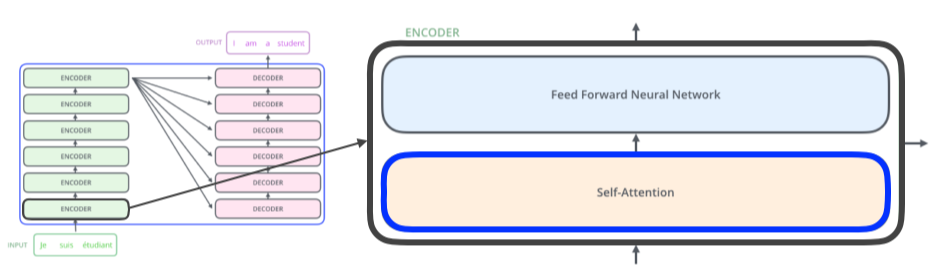
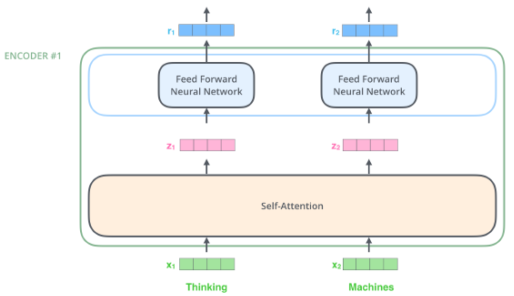
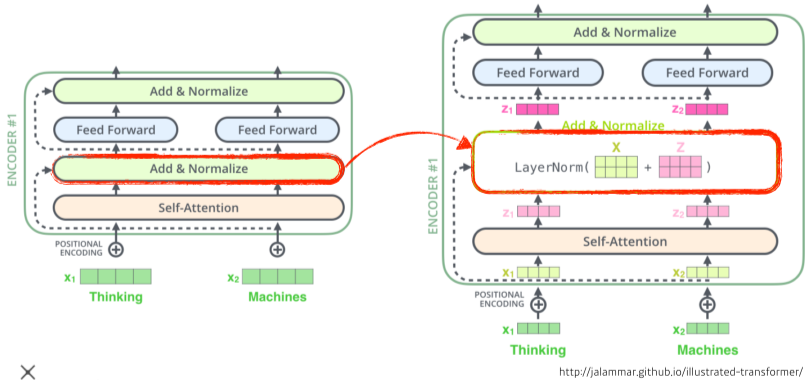
[img. encoder 구조]
-
Feed Forward Neural Network: MLP때와 동일
-
Self-Attention: encoder와 decorder 구조의 핵심, Attention이란 해당 단어를 처리할 때 다른 단어에 얼마나 관계성을 할당하는 가?이다.
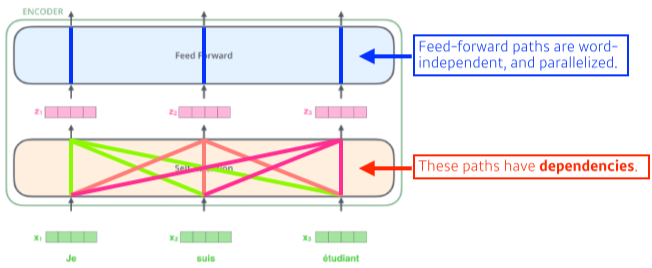
[img. 단계1, 2 ]
- 먼저 각 단어들을 embedding vector로 바꾼 뒤, self attention 층에서 입력된 n개의 단어들을 모두 고려하여 새로운 z벡터를 생성한다.
- 그 후 Feed Forward에서는 동일한 조건의 Feed-forward 층을 각 단어 독립적으로 통과 시킨다.
좀 더 자세한 벡터 처리 예시
[img. 단어가 2개 주어졌을 시 예시]
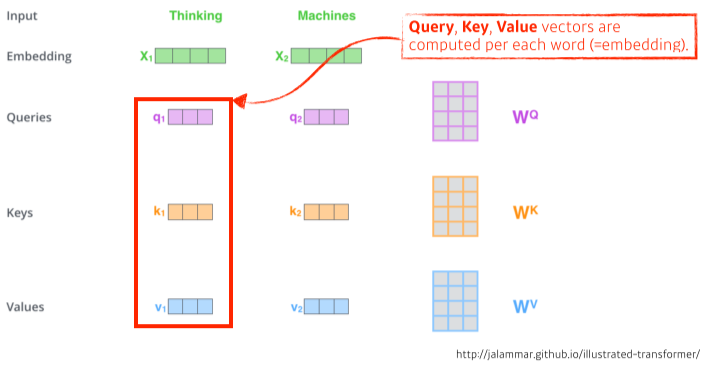
[img. 세 벡터 생성]
- Self attention 구조는 embedding된 벡터 형태로 단어가 주어지면, 각 단어 마다 Neutral network를 이용해 Queries, Keys, Values 라는 세개의 벡터(Q,K,V 벡터)를 생성한다.
- 이 세 벡터를 통해 embedding vector를 새로운 벡터로 바꿔준다.(=encoding)
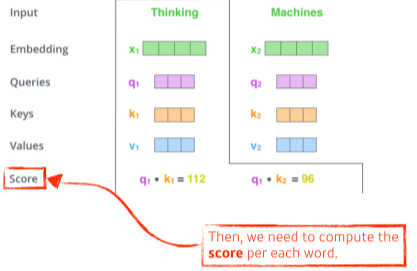
[img. Thinking 단어의 Score 생성]
- Thinking의 Queries 벡터와 모든 단어들의 Keys 벡터를 내적(inner product)하여 Score를 생성
- Score를 통해 다른 단어와의 관계성, 유사성 등(=attention)을 구할 수 있다.
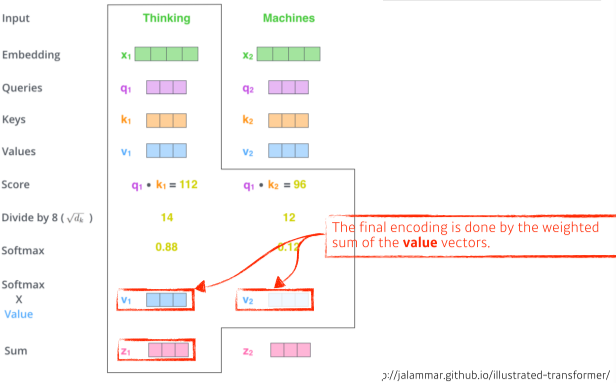
[img. Score의 normalize 및 z1 벡터 생성]
- Score 값을 8(키 벡터의 차원(여기서는 64)의 루트,$\sqrt d_k$)로 나눠 주어 Normalize(일정 범위에만 머무르게 하기 위해서)한다.
- 이 후, softmax 함수로 0~1 사이로 만들어 Attention weights를 만든다.
- Attention Weights를 Value vector로 Weighted Sum을 하여 한 단어의 z(인코딩 벡터) 벡터를 생성한다.
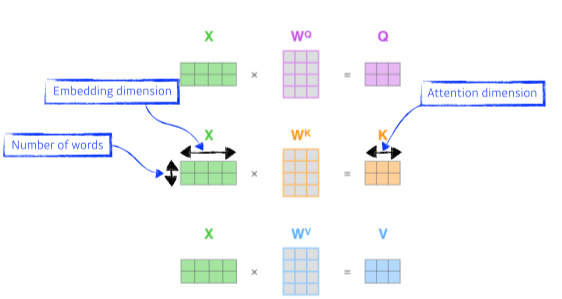
[img. Key, Query, Value vector 생성]
- W^Q^,W^K^,W^V^는 모든 단어가 공유한다.
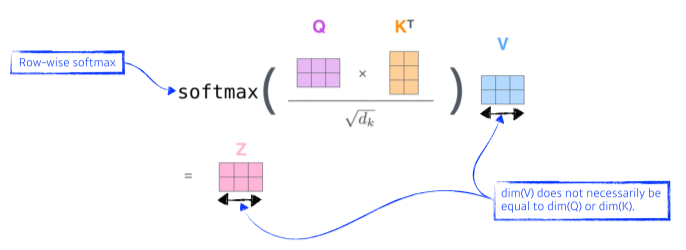
[img. 인코딩 벡터 생성]
- Value vector의 차원은 엄밀히 말해 weighted sum만 하므로 Query vector, Key vector와 달라도 된다.
Transformer 구조의 장단점
- 이런식으로 모든 단어들이 서로 영향을 주므로, 같은 단어라도 다른 단어가 들어가면 결과값이 달라지므로, 변화에 용이한 모델이 나온다..
- 대신 모든 단어를 고려해야하므로 많은 컴퓨팅 자원이 필요하다.
Multi-headed attention(MHA)
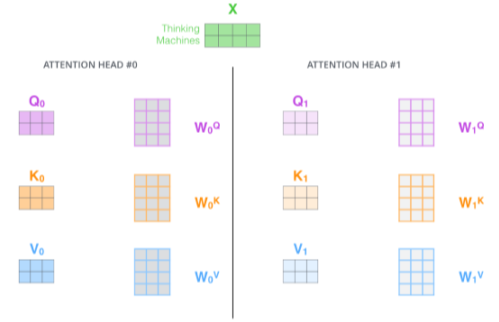
[img. attention이 2번 실행된 단어]
- attention 과정을 여러번 실행함, 단어마다 Query, Key, Value 벡터가 여러개 생성된다.
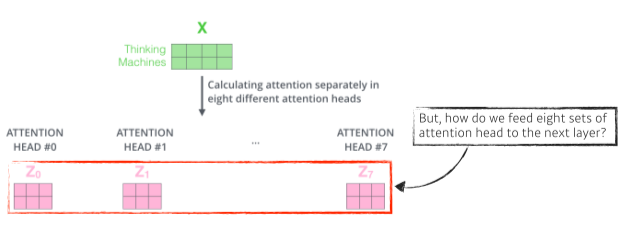
[img. 여럿 생성된 인코딩 벡터]
- 이를 통해 여러개(예시에선 8개)의 인코딩 벡터(z0~z7)를 생성하게 된다
- 이 8개를 합쳐서 다음 layer에 input 되어야 한다.
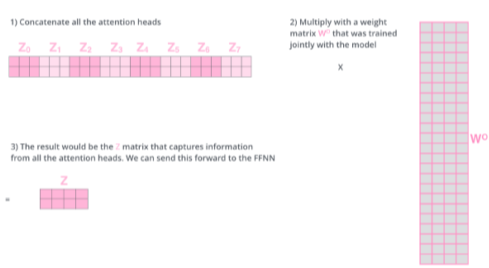
[img. learnable linear map을 통해 통합된 차원의 벡터(Z)로 생성]
- input된 단어, embedding vector와 output 인코딩 벡터(z)들의 차원이 같아야한다.
- 그러므로 Learnable Linear amp을 이용해 교육시킨 W^o^값을 곱해서 차원을 맞춰준다.
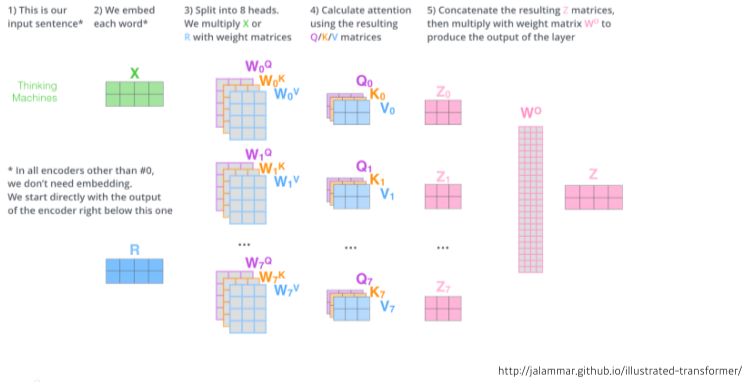
[img. 전체적인 MHA의 동작]
- 실제로는 위의 방법보다는 input의 embdding vector를 n개로 나눈 뒤, 나눠진 일부들로 attention을 만든 뒤, 다시 concatenate 한다.
- ex) 100차원 input -> 10개로 나누어 10차원 z0~z10 10개 생성 -> 100차원 output
(Z)으로 합침
- ex) 100차원 input -> 10개로 나누어 10차원 z0~z10 10개 생성 -> 100차원 output
-
(위의 n개의 동시 처리 예제에서 output을 구한 뒤 부터 이어짐) attention을 하기 이전에 embedding vector에 POSITIONAL ENCODDING 이라는 벡터를 더해준다.
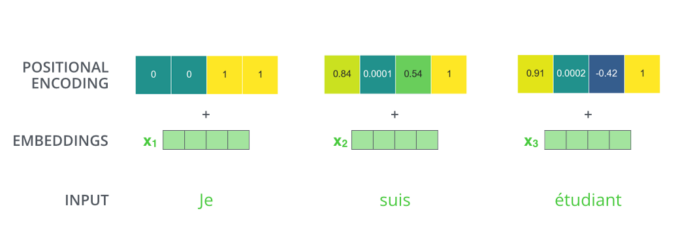
[img. positional encdoding의 합]
- 일종의 bias와 비슷하며, 위 attention 과정을 보면 data의 sequence와 independent 하기 때문에(즉, 단어의 순서가 뒤바껴도 같은 값이 나오게 되어있다.) 이를 방지하기 위해 더해준다.
[img. 512-dimensional 일시, positioinal encoding 벡터 구하는 법1]
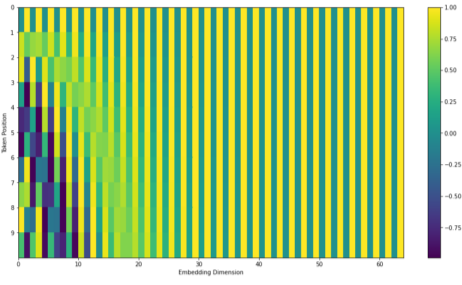
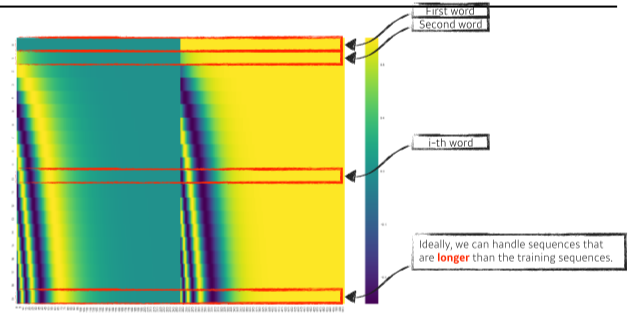
[img. 최신 방법의 Positional encoding 구하는 법 2]
- 포지션별로 특정 그래프의 값을 가져와 더해주면 된다.(predefined)
[전체적인 encoder의 과정]
decoder와 encoder 사이에는 어떤 정보가 교환되는가?
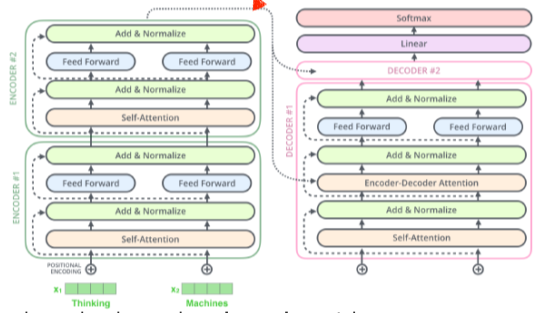
[img. encoder와 decoder 사이의 정보교환 그림]
- decoder에서는 주어진 vector로 유의미한 결과를 만드는 역할을 한다.
![]()
[gif. encoder decoder 통신 애니메이션1]
![]()
[gif. encoder decoder 통신 애니메이션2]
- 가장 상위 layer의 encoder의 결과값(z) 벡터의 key와 value, 두 벡터를 decoder layer들로 보낸다.
decoder는 어떻게 결과값을 만들어 내는가?
- 이후 decoder에 들어가는 Query vector와 k, v 벡터로 auto regressive 하게 결과물을 출력한다.
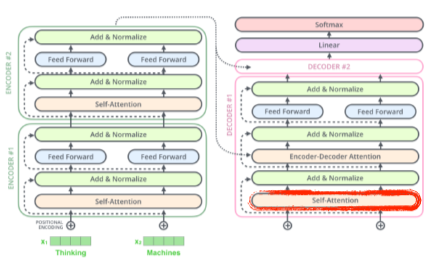

[img. decoder 학습 과정]
- 이후, decoder의 slef-attention layer에서 masking을 통하여 생성하려는 단어와 그 뒤 생성해야할 단어들을 가린 뒤, 앞에서 이미 생성한 단어에 의존해서 학습하게 만든다.
- 또, Encoder-Decoder attention layer에서 encoder에서 준 벡터 둘을 받아서 학습시킨다.
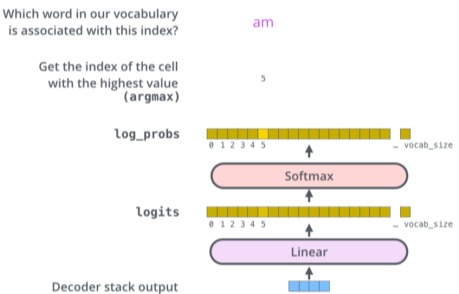
[img. decoder 학습의 최종 과정]
- 마지막 층에서는 단어들의 배열에서 단어를 샘플링해서 결과 값을 낸다.
Transform 모델의 근황
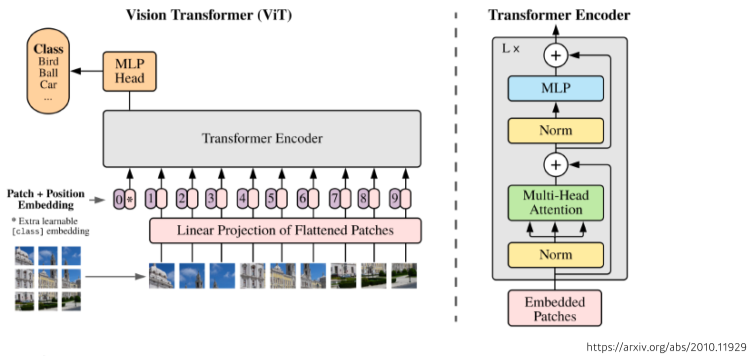
[img. encoder만 활용하여 이미지 class 구분하는 모델]
- 단순히 단어나 다른 sequential data 뿐만아니라 vision 영역에도 활용되고 있다.
- openAI의 DALL-E에서 문장을 통해 이미지를 생성하는 연구 또한 Transformer의 decoder를 활용하여 진행했다.
Generative Models(생성 모델)
Introduction
- Generative Model이란, 이미지 등을 생성하거나, 확률 밀도를 탐색하거나 비지도 특색 학습에 사용되는 모델을 의미한다.
- Generation: 이미지 생성 등(sampling)
- Density estimation: 이미지가 강아지 같은가? 고양이 같은가? (anomaly detection), classify 모델을 포함하고 있음. (explicit 모델, <=> inplicit model: 생성 위주가 가능한 모델)
- Unsupervised representation learning: 이미지 내부의 특색 탐색 (feature learning)
Basic Discrete Distributions
- Bernoulli distribution : 동전 던지기 처럼 0 또는 1이 나오는 형태
- $D={Heads, Tails}$
- Specify P(X = Heads)=p. Then P(X=Tails) = 1-p.
- 예를 들어 앞면이 p 면 뒷면이 나올 확률은 1-p다.
- Write: X ~ Ber(p).
- Categorical distribution: 주사위 던지기 같이 구분되는(discrete) 여러 결과값이 나오는 형태(1~6)
- $D={1,\dots,m}$
- Specify P(Y = i) = pi, such that $\sum^m_{i=1}p_i=1$.
- 모든 확률을 합해서 1
- Write: Y ~ Cat(p~1~, …, p~m~)
- 예시
- RGB pixel이 가지는 경우의 수는 256 * 256 *256이며, 필요한 파라미터의 수는 255*255*255.
Structure Through Independence & Conditional Independence
-
binary pixel의 수가 100개 라고하면 가능한 파라미터는 2^100^-1개가 되고, 이는 너무 많다.
-
만약 모든 Pixel이 서로 independent 한다고 가정하면 경우의 수는 같지만, 파라미터의 수는 n(=100)개로 줄일 수 있다.
- 하지만 실제로 independent 하지 않으므로 너무 말이 안되는 가정이다.
- 이 둘 사이의 타협점을 찾기위한 것이 Conditional independence 이다.
[math. Conditional independence의 세가지 룰]
- conditional independence: z가 주워 졌을때, x,y가 independence라고 가정하면 성립, 이를 chain rule과 섞으면 좋은 타협점을 가진 모델을 생성할 수 있다.
[math. chain rule과 conditional indepence의 조합]
- Markov assumption을 이용하면 parameter 수가 기존의 2^n^-1 에서 2n -1로 변한다.
- 이러한 conditional indepency 방법으로 생성한 모델을 Auto-regressive model이라고 한다.
Auto-regressive Model
- 28 X 28 binary pixel 이미지의 경우 우리는 p(x)를 구하기 위해 autoregressive model로 만들 수 있다.
- pixel의 order 순서에 따라 모델과 방법론이 달라지기도 한다.(아래 Pixel RNN 참조)
- NADE(Neural Autoregressive Density Estimator) 모델
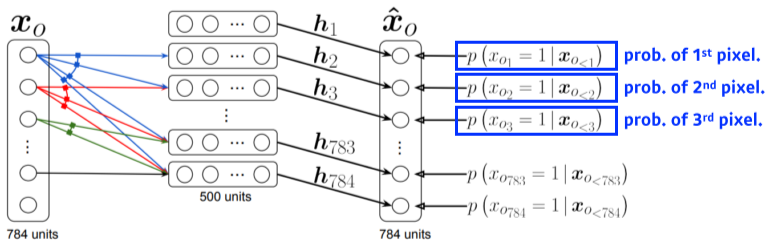
[img. NADE 모델]
- i 번째 픽셀을 첫번째 부터 i-1번째 픽셀에 dependent하게 생성(dense layer)
-
즉, $p(x_i x_{1:i-1}) = \sigma(\alpha_ih_i+b_i)\ where\ h_i=\sigma(W_{<i}x_{1:i-1}+c)$ 이다.
-
- 입력 차원이 점점 더 커지게 된다.
- explicit 모델이며 확률분포를 구할 수 있다.
[math. chaine rule을 통한 joint probability ]
- 연속적인 분포(continuous random variables)일 경우 a mixture of gaussian을 사용해 표현 가능
- Pixel RNN
- 이미지 내의 pixel 생성하는 auto-regressive 모델
[math.nXn RGB image 생성]
- ordering에 따라 Row LSTM, Diagonal BiLSTM으로 나눠짐
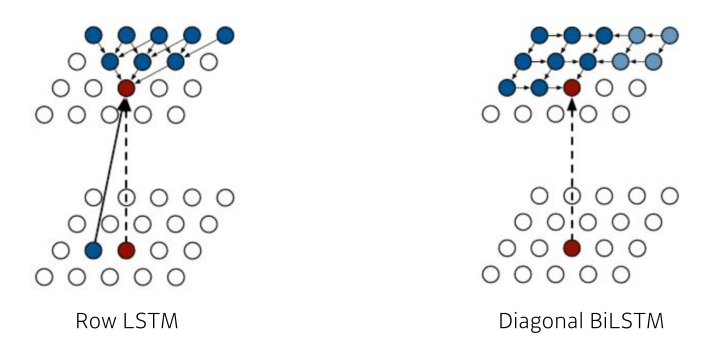
[img. 빨간 색이 생성할 pixel, 파란 색이 참조할 pixel이다.]
Latent Variable Models
Variational Auto-encoder
-
Variational inference(VI, 변분 추론)
- VI의 목적은 복잡한 posterior distribution(사후확률 분포)을 variational distribution(변분 분포)으로 최적화하는 것이다.
-
Posterior distribution($p_\theta(z x)$): 관심있는 random variable의 확률 분포, 이것의 반대, $p_\theta(x z)$는 likelihood라고 한다. z는 latent vector를 의미한다. -
Variational distribution($q_\theta(z x)$): Posterior distribution을 알기 쉽게 근사하는 분포.
-
- KL divergence를 loss처럼 이용하여 Variational distribution과 Posterior distribution의 차이를 줄인다.
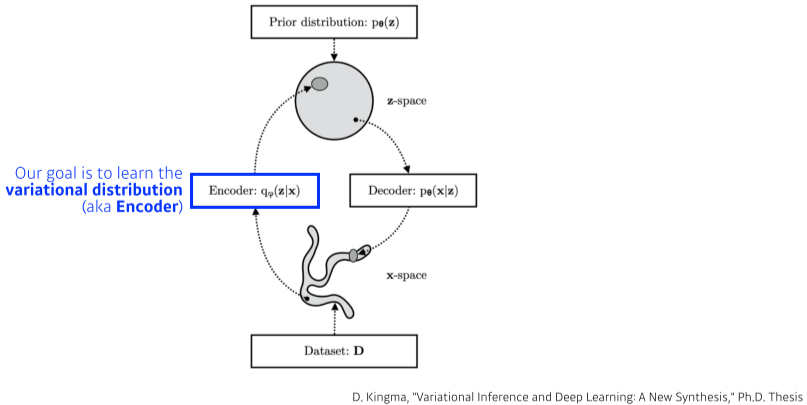
[img. VI의 그림화]
- VI의 목적은 복잡한 posterior distribution(사후확률 분포)을 variational distribution(변분 분포)으로 최적화하는 것이다.
-
하지만 우리는 posterior distribution에 근접한 variational distribution을 구하기 이전에, posterior distribution 자체를 모른다.
-
이를 구하기 위해 ELBO(Evidence lower bound)를 최대로 키우면 반대로 objective 구간은 줄어들게 된다.
- objective 구간은 KL divegence를 포함하므로 작아질수록 loss가 작아지는 효과와 비슷하다.
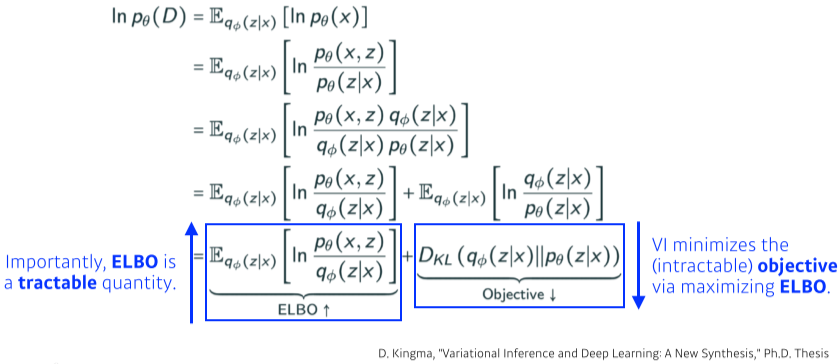
[img.이 방법을 Sandwitch method라고도 부른다.]
- Posterio distribution은 알 수 없지만, ELBO는 계산할 수 있다.
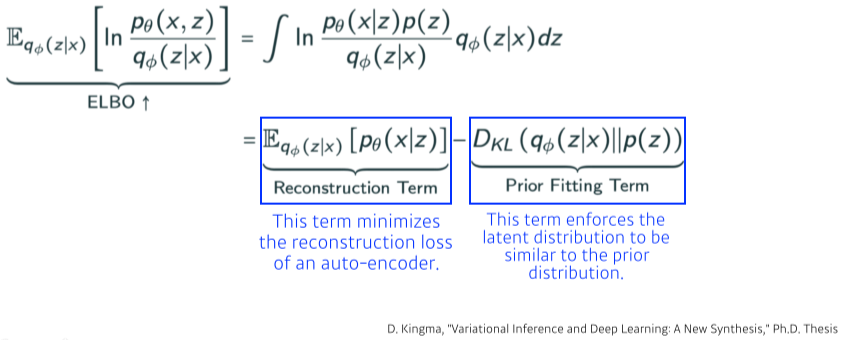
[img. ELBO가 가지고 있는 두개의 텀]
- ELBO는 두개의 텀을 가지고 있는데, 각각 Reconstruction Term과 Prior Fitting Term로 이루어져 있다.
- Reconstruction Term : encoder와 latent space를 거쳐 decoder로 돌아오는 reconstruction loss를 줄이는 부분
- Prior Fitting Term : latent space의 점들의 분포가 Prior distribution(사전 분포)와 비슷하게 만들어 줌
- 위의 두 텀 때문에 Variational Auto-encoder는 generative model이 된다.
- 입력 -> latent space -> 분포 찾아서 샘플링-> decoder -> output image 생성
- 그냥 Auto-encoder에는 존재하지 않으므로 generative model이 아니다.
- Variational Auto-encoder는 다음과 같은 단점을 가지고 있다.
- likelihood를 측정하기 힘듬(intractable model)
- prior fitting term의 KL divergence을 loss 처럼 사용하려면 SGD, Adam 등으로 최적화가 되어야하므로 미분 가능해야 함.
- 따라서 보통 isotropic Gaussian을 loss funtion에 넣어서 이용함
-
isotropic Gaussian: $D_{KL}(q_\phi(z x) \mathcal N(0,I))=\frac{1}{2}\sum^D_{i=1}(\sigma^2{z_i}+\mu^2{z_i}-ln(\sigma^2_{z_i})-1)$ - 모든 output dimension이 independent한 gaussian distribution을 의미함
-
Adversarial Auto-encoder(AAE)
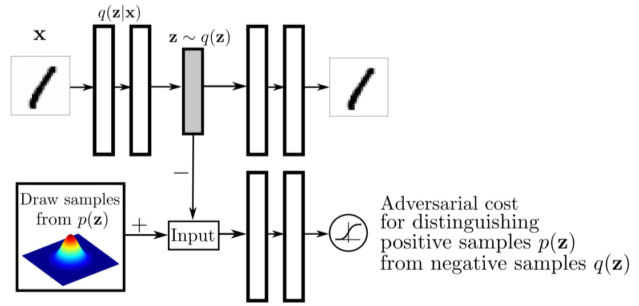
[img. AAE 구조]
- KL divergence라는 약점이있는 prior fitting term 대신에 GAN을 활용하여 latent distribution 사이의 분포를 맞춰줌
- 샘플링 가능한 distribution 이라면 latent prior distribution으로 활용 가능하다.
- 성능 또한 비교적 좋은 경우가 많다
Generative Adversarial Network(GAN)
GAN 소개
- GAN은 대략 2가지 단계로 이루어져 있는데, 샘플을 생성하는 모델(Generator)과, 샘플을 구별하는 모델(discriminator)로 되어있다.
- 새로운 샘플을 생성해서 구별 모델에 전달 :arrow_right: 실제 정보와 비교하여 샘플을 구별하여 생성 모델에 전달하고 학습 :arrow_right: 구별한 결과를 학습하여 더 나은 샘플을 생성해서 전달 :arrow_right: 무한 반복
- 마치 두 모델이 서로 싸우는 형식의 모델이다.
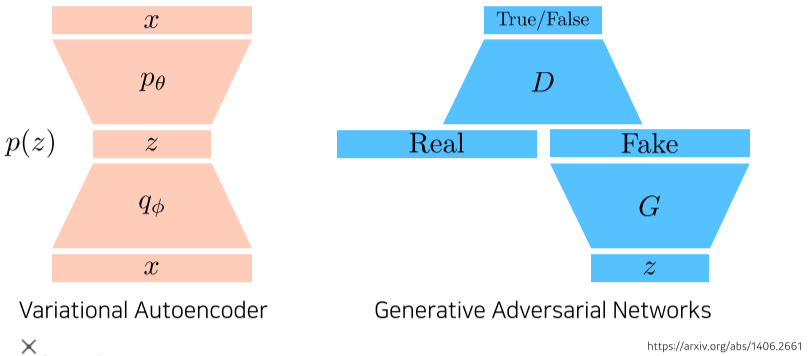
[img. VA vs GAN 비교]
- VA의 경우, X의 이미지가 들어오면 인코더, latent vector(z), 디코더를 통과하는 학습을 거친 뒤, generation 단계에서는 p(z)(latent distribution)에서 샘플링한 z를 decoder에 통과시킨 뒤, 그 결과값이 생성된 샘플이다.
-
GAN의 경우, z(latent distribution)을 통해서 Generator에서 Fake 이미지를 만들고, Real 이미지와 Fake 이미지를 Discriminator가 구별,학습해서 그 결과를 Generator에게 보내 학습 시킨다.
- 이를 수학적으로 표현하면 이와 같다. (implicity 모델이다.)
- Discriminator 입장
\(\stackrel {max}{D}\ V(D,G)=\mathbb E_{x\sim p_{data}(x)}[logD(x)] + \mathbb E_{z\sim p_z(z)}[log(1-D(G(z)))]\\ where\ optimal\ discriminator\ is\ D^*_G(x)=\frac{p_{data}(x)}{p_{data}(x)+p_G(x)}\) - Generator 입장
- optimal discriminator(=최적의 discriminator 일시 값) 적용시
- 여기서,
- 이며, 최종적으로
- 이는 이론상 최적의 discrimniator 일시, 최소화 해야할 generator 값이다.
- Discriminator 입장
여러 GAN 모델들
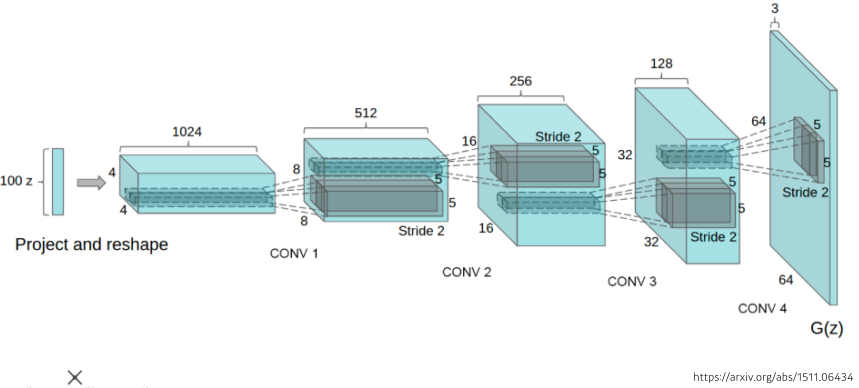
[img. DCGAN 모델]
- 이미지 생성하는 GAN 모델
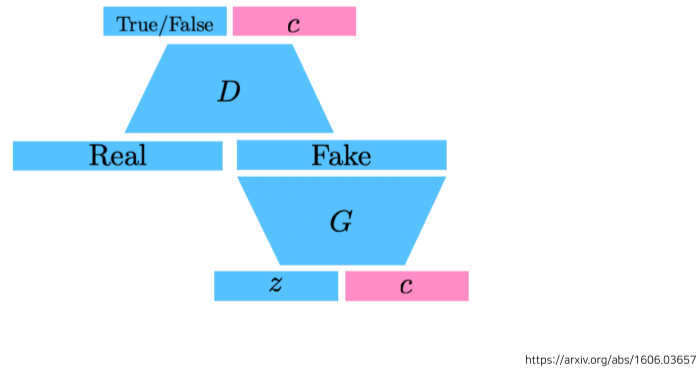
[img. Info-GAN]
- class를 추가로 인풋으로 넣어줌

[img. 주어진 문장에 맞는 이미지를 만들어주는 Text2Image]
- DALL-E와 비슷함
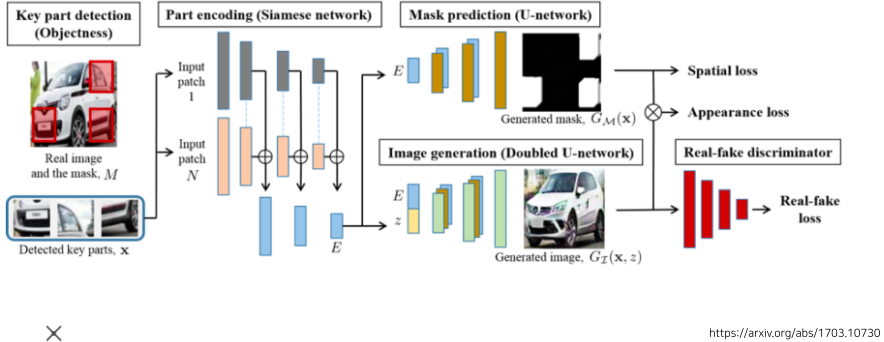
[img. Puzzle-GAN]
- 원래 이미지를 복원하는 모델
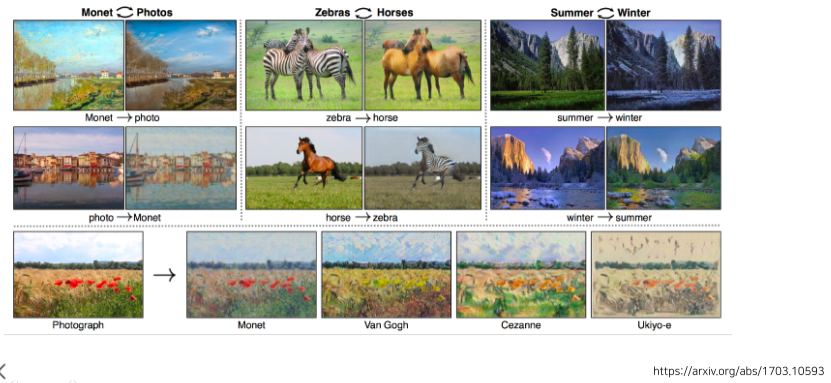
[img. CycleGAN]
- 이미지 내부의 도메인을 바꿔주는 모델
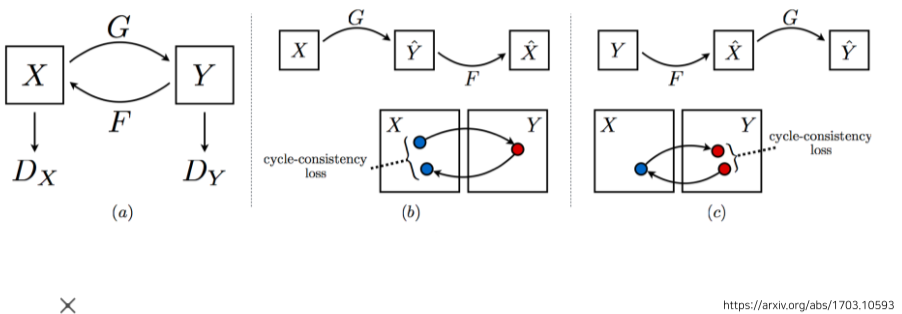
[img. Cycle-consistency loss]
- GAN 구조가 2개 들어있는 형식
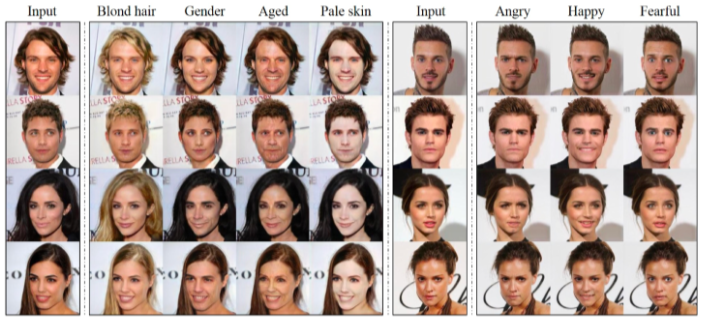
[img. Star-GAN]
- 이미지를 컨트롤할 수 있게 해줌
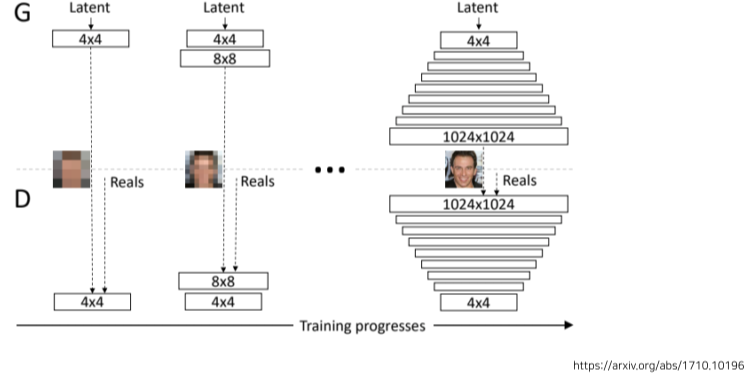
[img. Progressive-GAN]
- 고해상도의 이미지 생성하는 모델
_articles/AI/DEEP_LEARNING/딥러닝 기본.md